

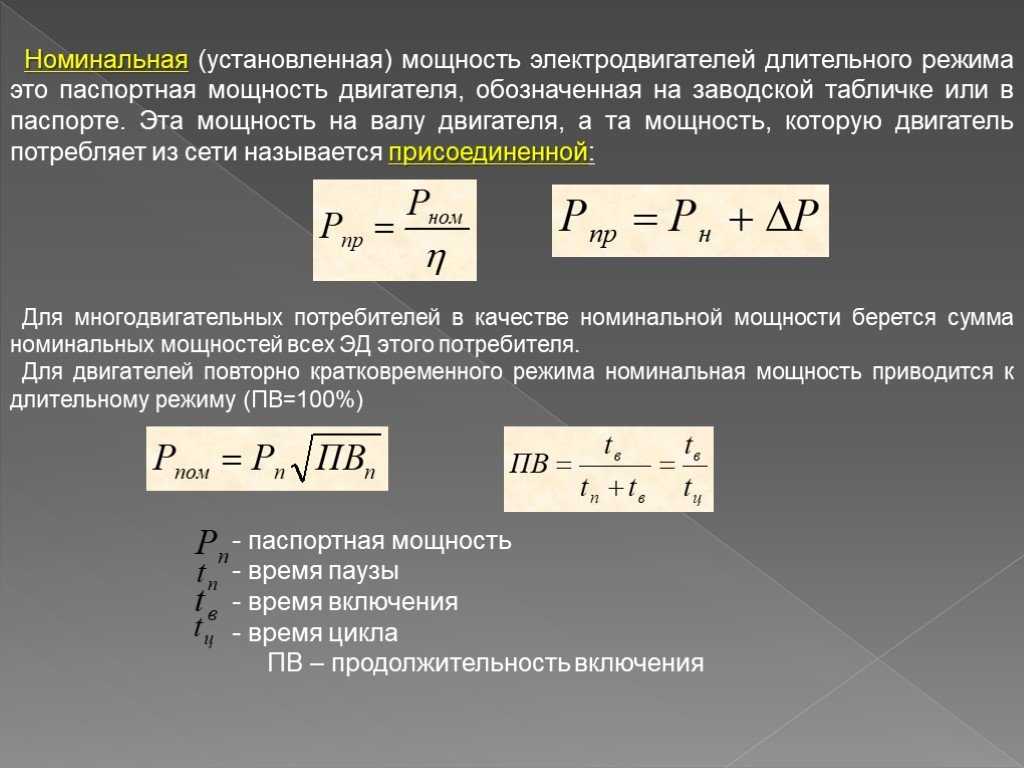
Что такое номинальные обороты двигателя?
Рисунок 5.3 — Диаграммы полезного момента М,
мощности тепловых потерь и температуры двигателя τ при работе в режимеS1
S2
—Режим кратковременной нагрузки — работа при постоянной нагрузке в течение заданного времени, меньшего, чем требуется для получения теплового равновесия, с последующим отключенным неподвижным состоянием, имеющим достаточную продолжительность для достижения машиной температуры окружающей среды. Характеризующей величиной является продолжительность кратковременной работы. Определяются следующие значения продолжительности кратковременной работы: 10, 30, 60 и 90 мин. Соответствующие режиму S2 диаграммы показаны на рис. 5.4.
Рисунок 5.4 — Диаграммы М,
и τ при работе двигателя в режиме S2
S3
—Режим повторно-кратковременной нагрузки — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов не достаточна для достижения теплового равновесия за время одного рабочего цикла, а наличие пускового тока существенно не влияет на нагрев. Соответствующие диаграммы показаны на рис. 5.5.
Для режима S3 характеризующей величиной является относительная продолжительность включения
, (5.10)
где —
период работы при номинальных условиях; — период отключенного неподвижного состояния (паузы);— продолжительность цикла.
Определяются следующие значения относительной продолжительности работы: 15, 25, 40 и 60 %. Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.
Рисунок 5.5 — Диаграммы М,
и τ при работе двигателя в режиме S3
S4
—Режим повторно-кратковременной нагрузки, включая пуск, — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время рабочего цикла. Диаграммы, соответствующие этому режиму, показаны на рис. 5.6.
Рисунок 5.6 — Диаграммы М
и τ при работе двигателя в режиме S4
S5 — Режим повторно-кратковременной нагрузки, включая электрическое торможение,
— последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке, быстрого электрического торможения и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время одного цикла. Соответствующие этому режиму диаграммы показаны на рис. 5.7.
Рисунок 5.7 — Диаграммы М,
и τ при работе двигателя в режиме S5
Для режимов работы S4 и S5 характеризующими величинами являются: относительная продолжительность включения, число включений в час, коэффициент инерции и постоянная кинетической энергии.
Под относительной продолжительностью включения понимается для режима S4
, (5.11)
, (5.12)
где, кроме известных величин, и — периоды соответственно пуска и торможения.
Продолжительность цикла, с, находится по формуле
, (5.13)
где — число включений (циклов) в час.
Под коэффициентом инерции понимается отношение суммы момента инерции двигателя и приведенного к валу двигателя момента инерции механизма к моменту инерции двигателя
. (5.14)
Постоянная кинетической энергии — отношение кинетической энергии, запасенной ротором при номинальной частоте вращения (угловой скорости), к номинальной полной мощности или произведению номинальных напряжения и тока в машинах постоянного тока.
Для режимов работы S4 и S5 определяются следующие значения величин: ПВ= 15, 25, 40 и 60 %; z= 30, 60, 90, 120, 180, 240 и 360 вкл./ч; —
1,2; 1,6; 2; 2,5 и 4.
S6
—Режим продолжительной работы при переменной нагрузке — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и на холостом ходу; длительность этих периодов недостаточна для достижения теплового равновесия за время одного рабочего цикла. Соответствующие диаграммы приведены на рис. 5.8.
Рисунок 5.8 — Диаграммы M, и τ при работе двигателя в режимеS6
Характеризующей величиной является продолжительность работы
, (5.15)
где — период работы на холостом ходу механизма.
Определяются следующие значения ПР = 15, 25, 40 и 60 %.
Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.
Типы шпинделей по числу оборотов
По данному показателю все валы разделяют на 3 категории:
- Маломощные – до 0,8 кВт включительно – устанавливаются на негабаритной технике, использующейся в небольших частных мастерских для решения упрощенных бытовых задач; развивают от 3 до 9 тысяч об/мин.
- Средние – от 1,5 до 5 кВт – применимы в стандартных условиях, для обработки заготовок из дерева, пластика, мягких металлов, а также для нанесения гравировки; поддерживают от 12 до 18 тысяч об/мин.
- Высокопроизводительные – от 5 кВт и выше – предназначены для промышленного оборудования, призванного решать самые масштабные и серьезные задачи; в общем случае доходят до 24 тысяч об/мин, хотя данный показатель не всегда является безусловным плюсом – те же твердосплавные или тонкие фрезы на такой скорости изнашиваются очень быстро.
Дополнительные материалы
Во время изготовления, большинство специалистов руководствуются в качестве дополнительного пособия, приведенными ниже показателями. Таблица коэффициента прочности:
| Материал заготовки | Граница прочности | Шкала твердости по Бринеллю | Коэффициент, МПа |
| легированная и
углеродистая сталь |
варьируется от
400–1100 единиц |
– | 1500–2600 |
| чугун, а также серый | – | 1400–2200 | 1000–1200 |
| бронза | – | – | 600 |
| силумин | – | – | 450 |
| дуралюмин | предел прочности
от 250 до 350, но часто встречается и выше в зависимости от качества заготовки |
– | 600–1100 |
Коэффициент прочности материала:
| Сталь, кг/мм | Значение показателя |
| 50,1–60,1 | 1,61 |
| 60,1–70,3 | 1,27 |
| 70,3–80,1 | 1,1 |
| 80,3–90,1 | 0,87 |
| 90,3–100,1 | 0,73 |
| Чугун, кг/мм | Значение показателя |
| 140,1–160,3 | 1,50 |
| 160,1–180,1 | 1,21 |
| 180,1–200,3 | 1,1 |
| 200,3–220,3 | 0,83 |
Коэффициент стойкости резца:
| Значение стойкости, минуты | Показатель |
| 27–30 | 1,27 |
| 43–46 | 1,11 |
| 57–60 | 1,09 |
| 83–90 | 1,03 |
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.



Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
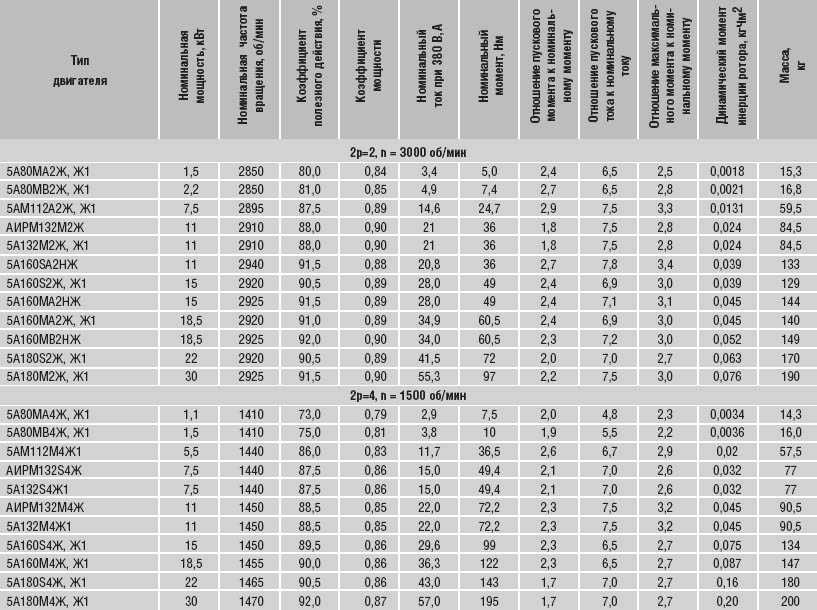
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Крутящий момент
Крутящий момент — ещё одна силовая характеристика шпинделя, напрямую зависящая от мощности:
где
τ – крутящий момент
P – мощность
ω – угловая скорость
На величину крутящего момента шпинделя влияет его конструкция. Существует несколько типов привода шпинделя: как правило, наибольший момент развивает шпиндель с зубчатой передачей. Большой крутящий момент нужен для обработки вязких материалов, таких как титан, нержавейка или жаропрочная сталь.
Возвращаясь к примеру со сверлением можно увидеть, что для сверления отверстия диаметром 50 мм с частотой вращения шпинделя 637 об/мин необходим крутящий момент 190,15 Н/м. Это довольно большая величина.

Формула для вычисления крутящего момента при сверлении:
где
Mc — потребляемый крутящий момент
Dc — диаметр сверла
kc — удельная сила резания
f — подача на оборот
По аналогии с мощностью крутящий момент часто указывают при продолжительном режиме (S1/ED100%) и перемежающемся режиме (S6/ED40%).
Ниже приведен график момента шпинделя станка CTX510ecoline:
По аналогии с графиком мощности на графике момента изображены две кривые: верхняя (пунктирная) линия это S6, нижняя (сплошная) линия – S1. Из графика видно, что до 500 об/мин величина крутящего момента максимальна, а при дальнейшем увеличении числа оборотов он уменьшается. Крутящий момент в двигателе создается за счет скольжения магнитного поля в статоре: при достижении номинальных оборотов скольжение начинает изменяться, что и вызывает снижение крутящего момента.
Таким образом следует учитывать, что крутящий момент, так же как и мощность зависит от режима работы двигателя: с перемежающей нагрузкой и до номинальных оборотов достигается максимальное значение крутящего момента в 630,6 Н/м, а при максимальных оборотах в этом же режиме крутящий момент составит примерно 100 Н/м.
Из графика видно, что шпиндель с такими характеристиками обеспечивает необходимый крутящий момент при работе со сверлом диаметром 50 мм с частотой вращения шпинделя 637 об/мин на любых режимах работы.
Роль опорной частоты
Опорная частота — это фиксированная частота, которая задается внутри частотного преобразователя и служит как эталон для сравнения с результирующей выходной частотой. Она является точкой отсчета, на основе которой происходит корректировка выходной частоты.
Роль опорной частоты заключается в том, что она позволяет управлять скоростью работы преобразователя и, соответственно, скоростью вращения подключенного к нему электрического двигателя. Если опорная частота увеличивается, то и выходная частота, и, как следствие, скорость вращения двигателя также увеличиваются. Если же опорная частота уменьшается, то и выходная частота, и скорость вращения двигателя уменьшаются.
Кроме того, опорная частота позволяет регулировать другие параметры работы преобразователя, такие как напряжение, ток и мощность. Она позволяет достичь необходимой точности управления и оптимальной работы электрического двигателя.
Таким образом, опорная частота играет важную роль в работе частотного преобразователя, обеспечивая точное и эффективное управление скоростью и параметрами электрического двигателя.
| Роль опорной частоты |
|---|
| Задание точки отсчета для сравнения с результирующей выходной частотой |
| Управление скоростью работы преобразователя и электрического двигателя |
| Регулировка напряжения, тока и мощности |
| Обеспечение точного и эффективного управления |
Определение опорной частоты
Опорная частота играет важную роль в работе частотного преобразователя. Она дает возможность управлять скоростью вращения электрического двигателя, подключенного к преобразователю. Позволяет задавать соответствующую частоту электрического сигнала, который будет подаваться на двигатель, и, тем самым, контролировать его работу.
Опорная частота также определяет диапазон рабочих частот преобразователя, то есть минимальную и максимальную частоту, которые он может сгенерировать. Настройка опорной частоты позволяет адаптировать работу преобразователя под конкретные требования процесса, в котором он используется.
Влияние опорной частоты на работу преобразователя
Опорная частота – это предустановленная частота, которая является точкой отсчета для преобразователя. Он используется для сравнения сигнала от обратной связи и управления скоростью вращения двигателя. Опорная частота может быть задана вручную или автоматически настраиваться преобразователем в зависимости от внешних условий и требований процесса.
Опорная частота непосредственно влияет на работу преобразователя и его способность поддерживать необходимую скорость двигателя. При задании низкой опорной частоты преобразователь будет работать в режиме низкой скорости, что может быть полезно, например, при пуске двигателя или применении преобразователя в низкоскоростных приложениях. Однако, если опорная частота слишком низкая, могут возникнуть проблемы с точностью управления и устойчивостью работы преобразователя.
Наоборот, при задании высокой опорной частоты преобразователь будет работать в режиме высокой скорости, что может быть полезно, например, для высокоскоростных приложений или процессов требующих точности управления. Однако, если опорная частота слишком высокая, это может привести к перегреву двигателя или недостаточной устойчивости работы преобразователя.
Таким образом, выбор опорной частоты является компромиссом между требуемой скоростью двигателя и стабильностью работы преобразователя. Применение оптимальной опорной частоты может значительно повысить эффективность работы преобразователя, улучшить точность управления и снизить риск возникновения проблем при использовании частотного преобразователя.
Что такое шпиндель
Шпиндель — единая ось в жестком диске, на которой установлено несколько магнитных пластин. Эти пластины закреплены на шпинделе на строго определенном расстоянии. Расстояние должно быть таким, чтобы при вращении пластин считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Чтобы диск нормально функционировал, двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов. Поэтому неудивительно, что иногда проблемы с диском связаны именно с заклиниванием шпинделя, а вовсе не с ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску.
Определение частотного преобразователя
В частотном преобразователе опорная частота используется для управления скоростью электродвигателей и других приводных устройств. Опорная частота задается оператором или автоматически определяется на основе внешних условий или параметров процесса.
Частотный преобразователь выполняет функцию преобразования переменного тока с одной частоты на другую с помощью электронных схем и управляющих алгоритмов. Он может быть использован в различных областях промышленности для регулирования скорости работы механизмов и оборудования.
Краткое описание устройства
Опорная частота в частотном преобразователе — это та частота, которая считается ссылочной и используется для определения относительной величины других частот в системе. Опорная частота является отправной точкой для регулирования частоты преобразования и может быть задана пользователем в соответствии с требованиями конкретного привода.
Принцип работы частотного преобразователя
Опорная частота — это фиксированная частота, которая задается в частотном преобразователе и служит основой для преобразования входной частоты.
Процесс работы частотного преобразователя начинается с преобразования переменного напряжения в постоянное с помощью выпрямителя. Затем постоянное напряжение преобразуется обратно в переменное с помощью инвертора, который регулирует частоту и амплитуду выходного напряжения.



Опорная частота играет ключевую роль в этом процессе. Она задает частоту, на которой будет работать электродвигатель или другое электротехническое оборудование. Повышение или понижение опорной частоты позволяет регулировать скорость вращения двигателя и, следовательно, регулировать скорость работы подключенного оборудования.
Важно отметить, что частотный преобразователь может изменять не только частоту, но и амплитуду выходного напряжения. Это определяет его возможности в управлении работой электромеханического оборудования
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Нагрузка насосов и типы нагрузки электродвигателя
Уровень важности величины
Частота вращения выражается в герцах (Гц), что равно одному обороту в секунду. Эта величина имеет большое значение в механике, электротехнике, физике и других научных дисциплинах.
| Область применения | Значимость |
|---|---|
| Механика | Важная |
| Электротехника | Очень важная |
| Физика | Критическая |
| Астрономия | Важная |
Механика использует частоту вращения для описания скорости вращающихся тел и механизмов
Она позволяет определить величину угловой скорости и периода вращения, что важно для конструирования машин и прогнозирования их работы
В электротехнике частота вращения используется для описания работы электрических моторов и генераторов. Она определяет скорость вращения ротора и помогает контролировать эффективность работы электродвигателей и генераторов.
Физика использует частоту вращения для изучения динамики объектов и получения информации о их структуре и материале. Отличительная особенность физических систем вращения позволяет определить их свойства и разработать новые теории и модели.
В астрономии частота вращения используется для измерения скорости вращения планет, звезд и галактик. Эти данные позволяют ученым изучать процессы формирования и развития космических объектов и прогнозировать их будущую эволюцию.
Таким образом, уровень важности величины частоты вращения в системе международных единиц измерений (СИ) очень высокий, поскольку она является основой для измерения и описания скорости вращения объектов, а также применяется в различных научных дисциплинах
Определение числа оборотов двигателя по диктофону на смартфоне
Для этого вам понадобится современный смартфон с установленной на нем программой диктофона.
При этом запись должна сохраняться и отображаться в графическом виде. Такое к примеру умеет делать прога TapeMachine.
Если у вас подобной нет, придется записать файл в формате mp3, после чего открыть его на компьютере в аудиоредакторе. Дабы ничего не скачивать, воспользуйтесь популярными онлайн сервисами.
Кладете смартфон рядом с двигателем и запускаете движок на холостом ходу. После чего к валу, где должна стоять шпонка, прикладываете жало отвертки.
Диктофон в этот момент должен фиксировать и записывать исходящие звуки ударов отвертки о ребра прорези под шпонку. Если у вас на валу установлен ролик, то можно на конец вала накрутить медную проволоку, а вместо отвертки взять кусок плотного картона (наждачку).
Удары в этом случае будут передаваться от проволоки к картонке. Поработав секунд десять, двигатель можно выключать.
После чего приступаете к анализу графической записи. Тонкая полоса — это звук работы вала.
Большие пики – моменты ударов отвертки. Выберите из всей записи наиболее удачный отрезок и посчитайте количество пиков в 1-ой секунде.
Допустим, их получилось 25шт. В минуту это дает 25*60=1500 оборотов.
Это и есть ваша синхронная частота вращения вала.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
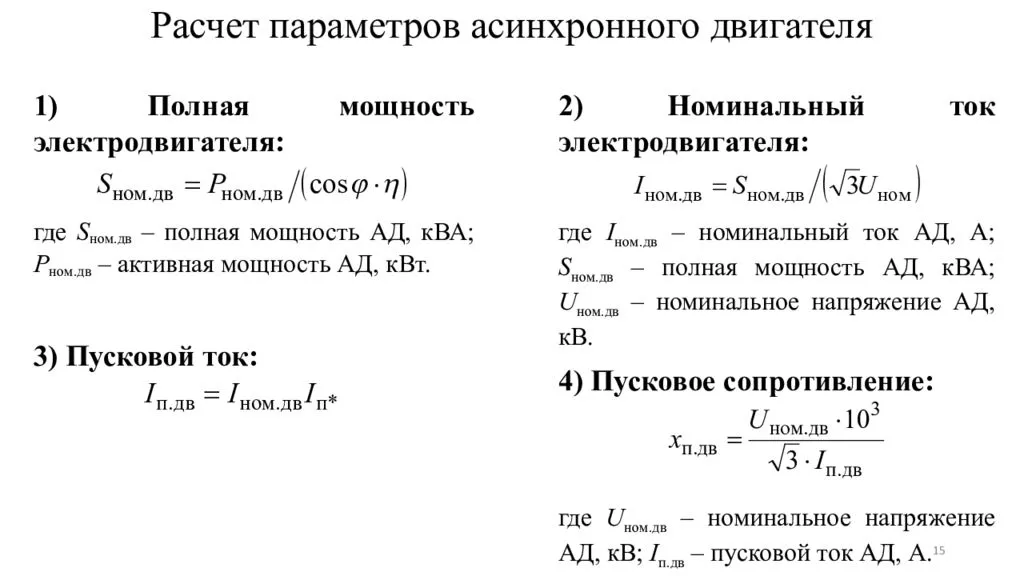
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Что такое скорость вращения шпинделя
Скорость вращения шпинделя (spindle speed) определяет, насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Скорость вращения измеряется в оборотах в минуту (RpM).



От скорости вращения зависит, как быстро компьютер может получить данные от жесткого диска. Перед тем как винчестер сможет считать данные, он должен их сначала найти.
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру, называется временем поиска (seek latency). После того как считывающие головки переместятся в нужную дорожку/цилиндр, надо дождаться поворота пластин, чтобы необходимый сектор оказался под головкой. Это называется задержками на вращение (rotational latency time) и является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Общие задержки на время поиска и задержки на вращение и определяют скорость доступа к данным. Во многих программах для оценки скорости hdd это параметр access to data time.
На что влияет скорость вращения шпинделя жесткого диска
Большинство стандартных 3,5″ жестких дисков сегодня имеют скорость вращения шпинделя 7200 оборотов в минуту. Для таких дисков время, за которое совершается половина оборота (avg. rotational latency), составляет 4,2 мс. Среднее время поиска у этих дисков — около 8,5 мс, что позволяет обеспечить доступ к данным примерно за 12,7 мс.
У жестких дисков WD Raptor скорость вращения магнитных пластин — 10 000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У «рапторов» и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным — примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которых скорость вращения шпинделя достигает 15 000 оборотов в минуту, а пластины еще меньше, чем у WD Raptor. Среднее время rotational latency у них — 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, среднее время доступа к данным — 5,8 мс.
Как узнать скорость вращения шпинделя жесткого диска
На некоторых моделях скорость шпинделя написана прямо на наклейке. Найти эту информацию несложно, так как вариантов немного — 5400, 7200 или 10 000 RpM.
Если на вашем жестком диске на наклейке нет этой информации (или просто нет желания доставать диск, чтобы посмотреть на наклейку), на помощь придут специальные программы. Большинство программ для проверки HDD и анализа SMART покажут вам скорость вращения шпинделя и другую информацию по жесткому диску.
Номинальный вращающий момент

Существует также соотношение между вращающим моментом и радиусом шкива: Момент = Сила * Радиус.

Это равенство говорит о том, что меньшем радиусе вращения сила увеличивается, и наоборот. То есть при проектировании устройства с асинхронным двигателем следует учесть тот факт, что действующая сила увеличивается с приближением к оси вала. В некоторых случаях эта особенность может сыграть важную роль.

Таким образом, для расчета всех необходимых электрических и механических характеристик электродвигателя достаточно знать данные, которые указаны на паспортной табличке или, другими словами, шильдике. Простые формулы помогут правильно настроить работу электрооборудования и оптимально использовать производственные ресурсы.

Как выбрать оптимальную мощность электродвигателя для станка
При выборе электродвигателя для станка следует учесть ряд факторов, включая требуемую мощность. Оптимальная мощность электродвигателя влияет на эффективность работы станка и его производительность. В этом разделе мы рассмотрим несколько ключевых факторов, которые помогут вам выбрать подходящую мощность электродвигателя для вашего станка.
1. Производительность станка
Одним из основных факторов, влияющих на выбор мощности электродвигателя, является производительность станка. Производительность зависит от таких параметров, как скорость вращения, глубина резания, подача инструмента и др. Чем выше требуемая производительность, тем большую мощность следует выбрать. Однако не стоит выбирать слишком большую мощность, так как это может привести к излишнему потреблению энергии и повышенным затратам на оборудование.
2. Размеры и тип обрабатываемых материалов

Размеры и тип обрабатываемых материалов также играют важную роль при выборе мощности электродвигателя. Если станок предназначен для обработки крупных и тяжелых деталей, требуется мощный электродвигатель, способный справиться с высокой нагрузкой. В случае обработки мягких или тонких материалов можно выбрать меньшую мощность
Важно учесть требования к точности обработки, так как высокая мощность может привести к деформации материала
При выборе мощности электродвигателя станка также следует обратить внимание на дополнительные функции и особенности станка, такие как наличие автоматических систем управления, возможность регулировки скорости вращения, поворот инструмента и т.д. Все эти факторы должны быть учтены для достижения оптимальных результатов и эффективной работы станка
Таким образом, при выборе оптимальной мощности электродвигателя для станка необходимо учитывать требуемую производительность, размеры и тип обрабатываемых материалов, а также особенности конкретного станка. Рекомендуется проконсультироваться с профессиональными специалистами, чтобы выбрать подходящий электродвигатель и обеспечить эффективную работу станка.
Расчет номинальной мощности
Метод эквивалентного тока
Применим для расчета номинальной мощности при обязательном соблюдении во время работы неизменности показателей мощности потерь в обмотках двигателя, складывающейся из постоянной и переменной величин мощности, сопротивлений обмоток ротора и статора, потерь на механическое трение. Зная номинальный коэффициент мощности, показатели эквивалентного тока и номинального напряжения, возможно рассчитать номинальную мощность электродвигателя:
Pном ≥ Iэк ∙ Uном ∙cosϕном,
где Iэк – показатель эквивалентного тока,
cosϕном – номинальный коэффициент мощности, повышающийся с увеличением мощности и номинальной угловой скорости вращения ротора, а также зависящий от нагрузки. Для большинства электродвигателей составляет 0,8-0,9.
Метод эквивалентного момента
Электродвигатели любого типа имеют пропорциональный произведению тока и величине магнитного потока вращающий момент. Метод эквивалентного момента для расчета номинальной мощности используется в тех случаях, когда условия применяемой нагрузки определяют непосредственно требуемый от двигателя момент, а не ток. Для синхронных и асинхронных машин переменного тока, коэффициент мощности cosϕ приближенно принимается за постоянную величину:
Pном = Мвр ∙ ωном,
где Мвр – значение вращающего момента,
ωном – номинальная угловая скорость двигателя.
Определение номинальной мощности опытным путем
Указанная в паспорте или щитке устройства номинальная мощность будет равна этому значению только при оптимальной нагрузке на вал, определяемой заводом-изготовителем для номинального режима. На что ориентироваться, если по каким-то причинам не сохранился паспорт или стерлись надписи на табличке?
Помогут практические измерения и :
- Необходимо полностью отключить все прочие источники потребления электроэнергии: освещение, электроприборы и т.д.
- В случае использования электронного счетчика, следует подключить двигатель под нагрузкой на 5-6 минут, на электронном дисплее отобразиться величина нагрузки в кВт.
Дисковый счетчик проводит измерения в кВт∙час. Следует записать последние показания и включить двигатель на 10 минут с точностью до секунды. После остановки электромашины, отнять из полученного значения записанные показания и умножить на 6. Полученное число и будет являться активной механической мощностью двигателя.