
Примеры переносного ускорения:
- Автомобильное ускорение: При резком нажатии на педаль акселератора автомобиля, водитель и пассажиры могут ощутить силовое воздействие, направленное в противоположном направлении движения. Это явление связано с переносным ускорением, которое возникает, когда автомобиль ускоряется и изменяет направление движения.
- Удар по футбольному мячу: При ударе по футбольному мячу с большой силой, мяч может изменить направление движения и ускориться в противоположном направлении. Это происходит из-за переносного ускорения, которое возникает в момент контакта с мячом и передается ему.
- Отрыв бумажного листа от блока: При отрыве бумажного листа от блока, можно почувствовать силовое воздействие, направленное в сторону отрыва. Это происходит из-за переносного ускорения, которое возникает при разрыве связей между листом бумаги и блоком.
Движение тела и его характеристики
Движение тела — это изменение его положения в пространстве со временем. Каждое движение можно охарактеризовать набором основных параметров.
- Скорость: скорость — это отношение пройденного пути к затраченному времени, то есть скорость = путь / время. Скорость измеряется в м/с или км/ч и указывает на то, как быстро тело перемещается.
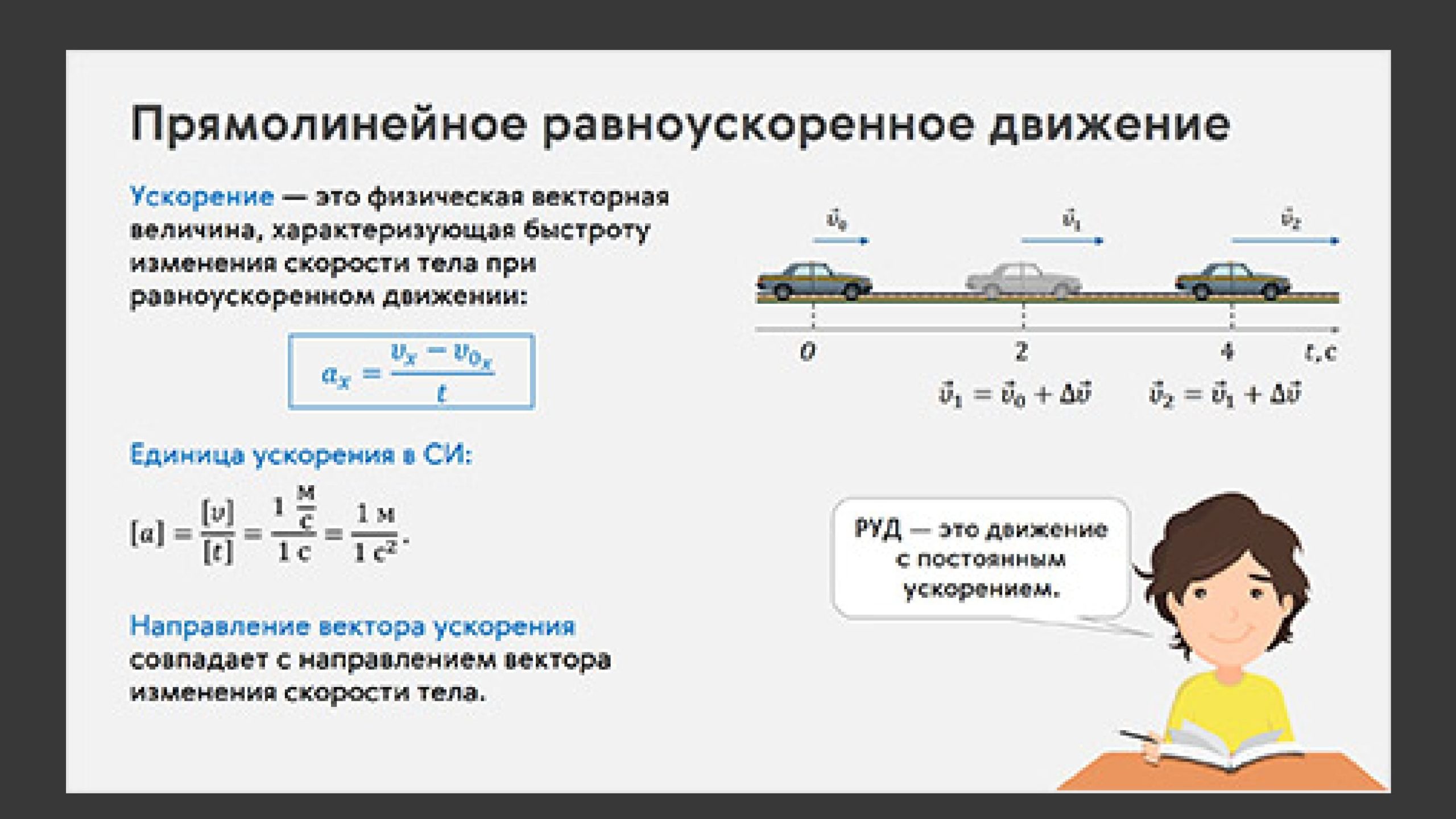
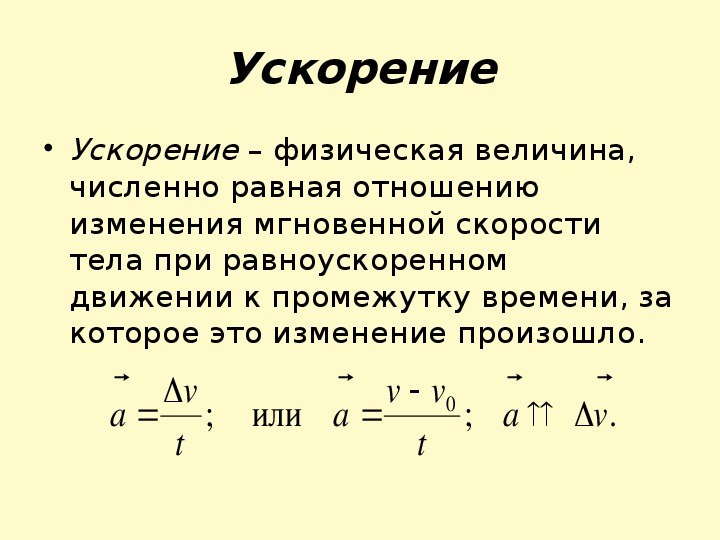
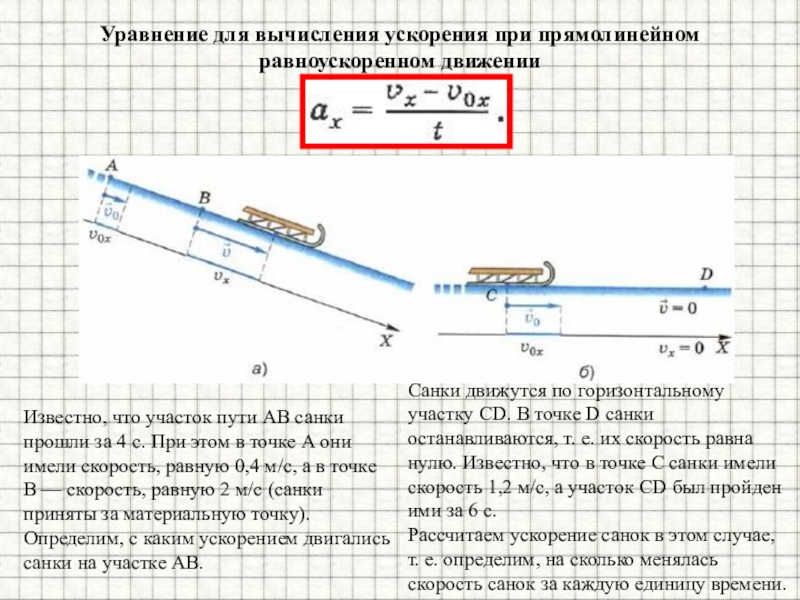
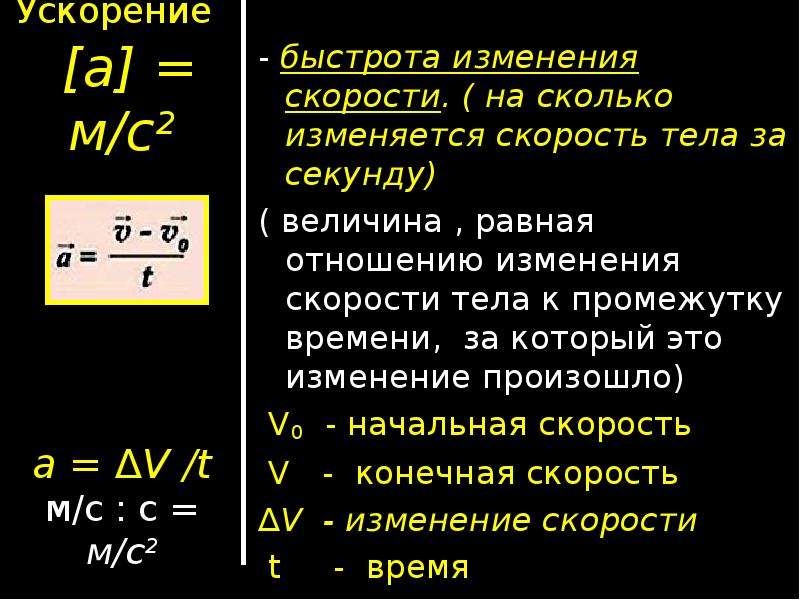
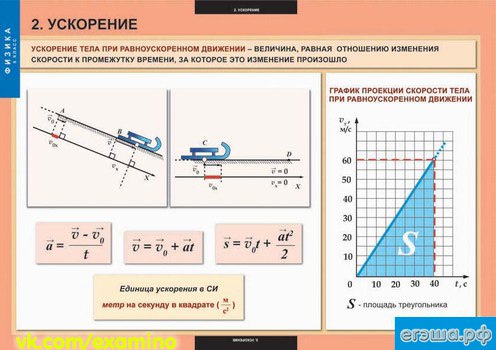
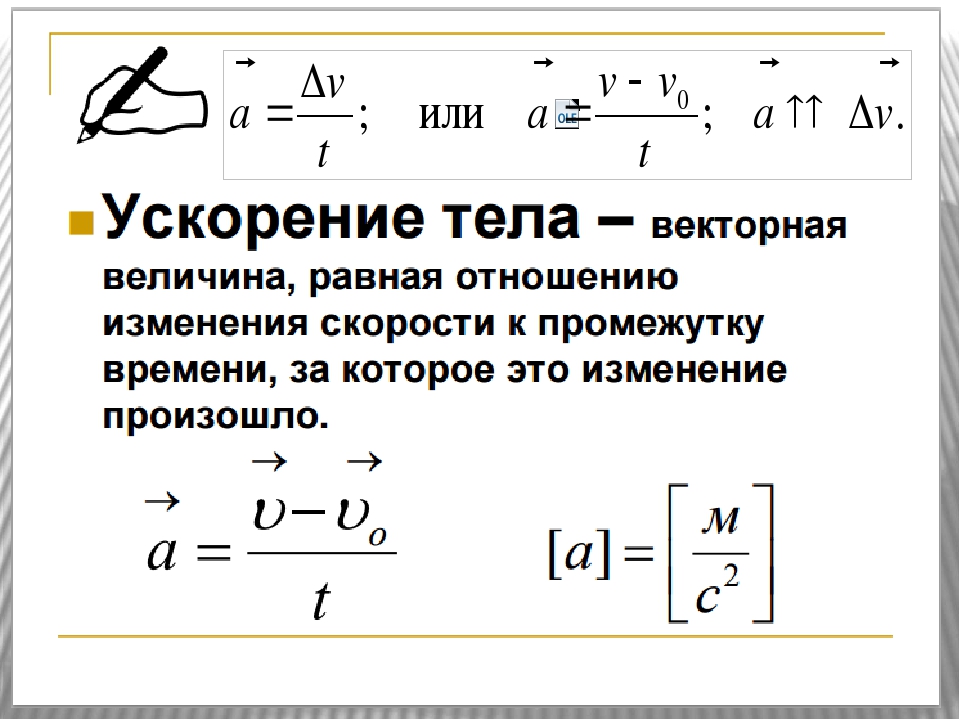
- Ускорение: ускорение — это изменение скорости со временем. Ускорение может быть положительным или отрицательным, которое указывает на увеличение или уменьшение скорости соответственно.
- Перемещение: перемещение — это изменение положения тела в пространстве. Оно может быть определено как разность между начальной и конечной позициями тела.
- Инерция: инерция — это свойство тела сохранять свое состояние покоя или равномерного движения, если на него не действуют внешние силы.
При изучении движения тела важно учитывать векторные характеристики, такие как скорость и ускорение. Вектор скорости указывает на направление движения и его изменение со временем, а вектор ускорения параллелен вектору скорости и указывает на изменение скорости
Движение тела можно описать с помощью различных математических методов, таких как уравнения движения, графики скорости и применение законов Ньютона. Эти инструменты позволяют анализировать и прогнозировать движение тела в различных условиях и с разными физическими характеристиками.
| Параметр | Определение |
|---|---|
| Скорость | Скорость — это отношение пройденного пути к затраченному времени, то есть скорость = путь / время. |
| Ускорение | Ускорение — это изменение скорости со временем. Ускорение может быть положительным или отрицательным, которое указывает на увеличение или уменьшение скорости соответственно. |
| Перемещение | Перемещение — это изменение положения тела в пространстве. Оно может быть определено как разность между начальной и конечной позициями тела. |
| Инерция | Инерция — это свойство тела сохранять свое состояние покоя или равномерного движения, если на него не действуют внешние силы. |
Определение и основные понятия
Ускорение точки обозначается символом a и имеет размерность метров в секунду в квадрате (м/с²). Вектор ускорения может быть направлен вдоль траектории движения точки или отклонен под углом к ней.
От полного ускорения можно выделить составляющую, направленную вдоль траектории движения. Ее обозначают как атангенциальное ускорение. Отклонение вектора ускорения от тангенциальной составляющей называют радиальным ускорением.
Благодаря понятию полного ускорения, можно более точно описывать движение точек и тел, а также проводить анализ различных физических явлений и задач, связанных с перемещением объектов.
Полное ускорение точки: понятие и математическое определение
Для определения полного ускорения в конкретный момент времени, необходимо знать два параметра: скорость точки и ее изменение по времени. Полное ускорение определяется как производная вектора скорости по времени:
a = dv/dt
где a — полное ускорение точки, dv — изменение вектора скорости и dt — изменение времени.
Полное ускорение может быть разложено на две составляющие: касательное ускорение и нормальное ускорение. Касательное ускорение отражает изменение модуля вектора скорости, а нормальное ускорение характеризует его изменение в направлении.
Изучение полного ускорения точки позволяет более точно описывать ее движение и предсказывать его изменение в будущем. Это важный инструмент в науке и технике, который помогает разрабатывать эффективные алгоритмы и модели движения.
Инерциальная система отсчета и связь с полным ускорением точки
Полное ускорение точки в ИСО определяется как сумма ускорения относительно системы отсчета и ускорения системы отсчета самой по себе. Оно может быть вычислено с помощью второго закона Ньютона:
а = F/m
где a — полное ускорение точки, F — сила, действующая на точку, m — ее масса.
Инерциальная система отсчета часто используется в физике для упрощения решения задач. Она позволяет исключить дополнительные факторы, такие как сопротивление среды или внешние силы.
Связь полного ускорения точки с инерциальной системой отсчета позволяет учитывать все силы, действующие на точку, и определять ее движение с высокой точностью. Использование ИСО позволяет исключить нежелательные эффекты и достичь более точных результатов в физических расчетах и экспериментах.
Направление тангенциального ускорения
Направление тангенциального ускорения зависит от типа движения объекта по траектории. Рассмотрим несколько случаев:
- Если объект движется по прямой, то направление тангенциального ускорения совпадает с направлением движения.
- Если объект движется по окружности с постоянной скоростью, то направление тангенциального ускорения направлено по касательной к окружности.
- Если объект движется по окружности с переменной скоростью, то направление тангенциального ускорения всегда направлено по касательной к траектории. При этом, если скорость увеличивается, тангенциальное ускорение направлено в том же направлении, что и скорость. Если скорость уменьшается, направление тангенциального ускорения противоположно направлению скорости.
Направление тангенциального ускорения играет важную роль при решении физических задач, связанных с изучением движения тел. Понимая направление тангенциального ускорения, можно определить, как меняется скорость объекта и предсказать дальнейшее движение.
Векторное представление тангенциального ускорения
Векторное представление тангенциального ускорения характеризуется как модулем, так и направлением. Модуль ускорения определяется как изменение скорости объекта за единицу времени. Направление тангенциального ускорения всегда сонаправлено с вектором скорости.
Для математической записи векторного представления тангенциального ускорения используется символ at. Здесь «t» означает тангенциальное (касательное) направление. Вектор аt может быть представлен как:
at = v2 / R
где v — скорость объекта, а R — радиус кривизны его траектории.
Векторное представление тангенциального ускорения является важным понятием в динамике и механике. Оно позволяет определить, как изменяется движение объекта при изменении его скорости и направления.
Таким образом, векторное представление тангенциального ускорения важно для изучения механики и движения тел в пространстве
Направление вращательного движения
Когда рассматриваем вращательное движение, необходимо учитывать направление углового ускорения, а не просто его величину. В уравнении движения твердого тела можно выделить две главные компоненты вращательного движения: угловое ускорение и момент силы, действующий на тело.
Направление вращательного движения определяется согласно правилу правой руки. Если положить правую руку так, чтобы пальцы указывали в направлении вектора угловой скорости, то большой палец будет указывать направление вектора углового ускорения. Таким образом, вектор углового ускорения ортогонален плоскости вращательного движения и определяет направление изменения угловой скорости.
Определение направления вращательного движения важно для решения разнообразных задач, связанных с динамикой вращательного движения. Например, для определения направления силы, необходимой для изменения угловой скорости твердого тела, или для понимания эффектов прецессии и нутации
Ориентация тела в пространстве определяется вектором угловой скорости, а его изменение — вектором углового ускорения. Знание направления вращательного движения позволяет более точно моделировать, предсказывать и анализировать поведение твердых тел, и использовать их в различных сферах науки и техники.
| Вектор угловой скорости | Вектор углового ускорения |
|---|---|
| Ортогонален плоскости вращательного движения | Определяет направление изменения угловой скорости |
| Определяет ориентацию тела в пространстве | Позволяет более точно моделировать и анализировать поведение твердых тел |
Техническое применение переносного ускорения
Переносное ускорение используется в проектировании транспортных средств, чтобы обеспечить безопасность и комфорт при движении. Например, при разработке автомобилей учитывается переносное ускорение, чтобы обеспечить стабильность движения на поворотах и при изменении скорости.
В аэрокосмической инженерии переносное ускорение играет важную роль при проектировании космических кораблей и спутников. При запуске ракеты в космос, переносное ускорение учитывается для точного расчета траектории полета и достижения необходимой орбиты.
Также, в робототехнике и автоматизации, переносное ускорение применяется для оптимизации движения роботов и создания более эффективных систем управления. Например, при разработке роботов-манипуляторов учитывается переносное ускорение, чтобы обеспечить точность и безопасность выполнения задач.
В медицине переносное ускорение используется для разработки и оптимизации медицинского оборудования. Например, при создании аппаратов для томографии учитывается переносное ускорение, чтобы достичь максимальной точности изображений и минимального влияния на пациента.
Таким образом, понимание и применение переносного ускорения открывает широкие возможности для развития различных технологий и повышения эффективности различных процессов в инженерии и науке.
Ускорение материальной точки
Компонент ускорения (вид ускорения координатных осей), как и в предыдущем случае. ; ;. Измерение ускорения:.
Тангенциальное (касательное) и нормальное ускорения
Теперь рассмотрим направление вектора ускорения относительно траектории. Для этого примените следующее уравнение Примените правила дифференциации продукта для дифференциации во времени.
Вектор ориентирован вдоль касательной к траектории. В каком направлении движется производная по отношению к моменту времени?
Чтобы ответить на этот вопрос, воспользуемся тем, что длина вектора постоянна и равна единице. В этом случае квадрат его длины также равен единице. В дальнейшем два вектора в скобках — это их ступенчатые произведения. Выделим последнее уравнение во времени: ? ; ;. Произведение градиентов этих векторов равно нулю, поэтому эти векторы перпендикулярны друг другу. Поскольку векторы ориентированы вдоль касательной к траектории, векторы перпендикулярны касательной.
Скорость, тангенциальное и нормальное ускорение в точке M.
Первый компонент называется тангенциальным или касательным ускорением. Второй компонент называется нормальным ускорением. Далее, общее ускорение:. Это уравнение представляет собой анализ ускорения двух компонентов, перпендикулярных орбите и перпендикулярных друг другу.
Тангенциальное (касательное) ускорение
Для скорости введите алгебраическое значение вектора тангенциального ускорения. Если векторы тангенциального ускорения направлены в ту же сторону, что и случае эти векторы противоположны. Абсолютное значение тангенциального ускорения обозначено прямыми скобками. Итак
Умножьте обе части уравнения (2) на градусы. В конечном итоге Итак ;. Место здесь:. Таким образом, мы видим, что алгебраическое значение тангенциального ускорения равно проекции полного ускорения на тангенциальное направление траектории. Это также равно производной по времени от алгебраического значения скорости точки.
Заменив эти два показателя, мы получим, что Мы учтем это здесь.
Найдите производную по времени от коэффициента скорости. Примените правило дифференциации:? .
Да Если угол между вектором ускорения и вектором скорости составляет острый угол, то движение ускоряется. Абсолютное значение скорости увеличивается. Если угол между ними тупой:, движение замедляется. Абсолютное значение скорости уменьшается.
Выразите ускорение через тангенс и нормаль:, и оно дано. Получить:. Первое может быть выражено в терминах тангенциального ускорения. Если тангенциальное ускорение и вектор скорости направлены в одну сторону, то движение ускоряется. Если они расположены в противоположных направлениях, движение замедляется.
Радиус кривизны траектории
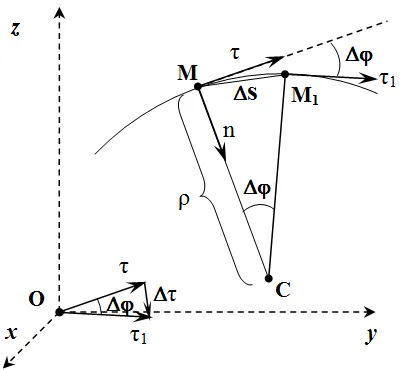
Рассмотрим векторы в двух точках в момент времени t и в момент времени t.1. Представьте символизм:. Согласно определению деривативов:. Предположим, что в момент времени t точка находится в положении M, а в момент времени t:.1 -позиция M1 (см. схему).
Коэффициент усиления рыскания
Коэффициент усиления рыскания определяет степень рыскания автомобиля в ответ на изменение угла поворота рулевого колеса в квазиустойчивом состоянии. Коэффициент усиления рыскания можно определить, выполнив следующее испытание: при движении с постоянной скоростью рулевое колесо поворачивается из стороны в сторону с частотой менее 0,2 Гц. Амплитуда угла поворота рулевого колеса выбирается таким образом, чтобы максимальное боковое ускорение составило около 3 м/с2. Начиная со скорости 20 км/ч, маневр повторяется с увеличением скорости каждый раз на 10 км/ч. При условии отсутствия аэродинамических воздействий на высоких скоростях (подъемных сил, воздействующих на переднюю и заднюю оси), результаты испытания дают кривые коэффициента усиления рыскания, в основном согласующиеся со следующим уравнением, выведенным из одноколейной линейной модели:
(Ψ/δ)stat = v/(l+EG⋅v2)
На рис. «Зависимость коэффициента усиления рыскания от скорости» показан коэффициент усиления рыскания для автомобиля, имеющего тенденцию к избыточной поворачиваемости (EG<0), нейтральную управляемость (EG=0) и тенденцию к недостаточной поворачиваемости (EG>0). При высоких скоростях движения приемлемой является только недостаточная поворачиваемость, обеспечивающая требуемую динамику автомобиля даже во время движения по прямой. Скорость, при которой автомобиль, имеющий тенденцию к недостаточной поворачиваемости, демонстрирует максимальную реакцию рыскания, известна как характеристическая скорость vchar. В линейной одноколейной модели эта скорость выражается как:
vchar = √¯l/EG
Ступенчатое изменение — скорость
Электромеханическое ступенчатое изменение скорости осуществляется комбинированием систем ступенчатого электрического и механического изменения.
Для ступенчатого изменения скорости движения используют двух -, трех -, и четырехскоростные асинхронные электродвигатели или различные механизмы на основе зубчатых передач.
Возможность ступенчатого изменения скорости поля, как известно из курса теории электропривода , обеспечивает снижение потерь энергии, выделяющихся в двигателе в переходных процессах пуска и торможения.
|
Различные законы развития деформации во времени за один цикл нагружения. |
Случай ступенчатого изменения скорости деформации является наиболее интересным с точки зрения проверки универсальности использования различных теорий, описывающих сложные реологические свойства при горячей деформации. При плавно меняющихся значениях сопротивления деформации уже обычный вариант теории упрочнения достаточно хорошо описывает кривые текучести. При ступенчатом же изменении скорости деформации на два-три порядка аналитические решения по уравнениям теории упрочнения или творив старения часто приводят к заметным расхождениям с экспериментальными данными.
В конструкции В ступенчатое изменение скорости получается с помощью небольших суживающих сечение выступов на наружной стенке каждой из кольцевых камер; эти сужения уменьшают расход и перепад давления у внутренних выходных отверстий. В обеих конструкциях далее по потоку должны быть устроены добавочные отверстия в стенках камеры, чтобы подвести добавочный воздух и раздробить осевой язык пламени.
Для станков со ступенчатым изменением скоростей наряду с кинематическими схемами приведены графики чисел оборотов коробок скоростей и коробок подач, которые существенно облегчают самостоятельное изучение кинематических цепей.
Для привода со ступенчатым изменением скоростей подъема крюка в этом случае число скоростей должно быть равно числу свечей в колонне, что практически невозможно осуществить; поэтому в подъемных механизмах только с механическими передачами и двигателями с нерегулируемой частотой вращения валов большое значение имеют выбор числа и соотношения скоростей подъема, обеспечивающих минимальные затраты времени на подъем, а также простота конструкции подъемного комплекса.
Метод основан на ступенчатом изменении скорости перемешивания, при этом размер капель изменялся от одного стационарного значения до другого. Так, если скорость мешалки уменьшается, то размер капель возрастет до нового значения, так как в новых условиях скорость коалесценции должна превышать скорость дробления. Если существует некоторая упрощенная модель системы, это явление можно использовать для измерения частоты коалесценции.
|
Переходные функции силы тока, частоты вращения двигателя и приращения длины петли при изменении. |
Статическая ошибка при ступенчатом изменении скорости секции / ( vj и сигнала, задающего скорость линии ( v3), равна: 6vl 8V3 0 при ПИ-регуляторе и Svl 8V3 2тп при П — регуляторе.
|
Потери энергии при одноступенчатом ( а и многоступенчатом ( б изменении скорости холостого хода двигателя. |
Другой способ состой в ступенчатом изменении скорости холостого хода юо. На рис. 6.2 6 представлен график потерь при четырехступенчатом изменении скорости идеального холостого хода двигателя. Как следует из рисунка и физических представлений, энергия, запасенная ипер-ционностями привода, Wl будет пропорциональна горизонтально заштрихованной площадке и останется неизменной по сравнению с энергией при одноступенчатом пуске. Энергия же потерь в двигателе, пропорциональная вертикально заштрихованным площадкам, существенно уменьшится по сравнению с энергией при одноступенчатом пуске.
При постоянной скорости качении проводится ступенчатое изменение скорости и обкатка на каждой скорости до стабилизации теплового состояния. В конце обкатки на каждой ступени измеряют либо продольное касательное усилие, либо крутящий момент на оси барабана, к которому прижимается покрышка.
Автоматы ТС имеют один электродвигатель и ступенчатое изменение скорости подачи проволоки при помощи сменной пары шестерен. Автоматы УТ имеют два двигателя и плавное, бесступенчатое изменение скорости подачи проволоки при помощи вариатора скоростей.
Что такое переносное ускорение?
Переносное ускорение — это ускорение, которое возникает в системе отсчета, связанной с движущимся телом. Оно характеризует изменение скорости тела относительно окружающей его среды и зависит от его массы и применяемой силы.
Переносное ускорение обычно проявляется в системе отсчета, связанной с неподвижной средой. Например, если человек стоит в поезде, то его тело имеет переносное ускорение относительно платформы, так как оно движется вместе с поездом, а сама платформа остается неподвижной.
Формула для расчета переносного ускорения:
a = v2/r
Тут:
- a — переносное ускорение
- v — скорость тела
- r — радиус кривизны при движении
Пример переносного ускорения можно наблюдать, когда автомобиль движется по круговому повороту. В этом случае, автомобиль приобретает переносное ускорение, так как его движение не может быть описано только равномерным прямолинейным движением.
Примеры переносного ускорения
Тело
Сила, вызывающая ускорение
Ускорение
Автомобиль на повороте
Силы трения между шинами и дорогой
Направлено в сторону центра окружности, по которой движется автомобиль
Карусель с людьми
Силы трения между ногами людей и платформой
Направлено в сторону центра карусели
Ракета при старте
Сила, выталкивающая газы из сопла
Направлено противоположно движению ракеты
Важно отметить, что переносное ускорение может быть как направлено внутрь окружности (когда тело движется по кривой траектории), так и направлено наружу (например, при смешении взбалтываемой жидкости в сосуде). Также стоит заметить, что переносное ускорение может быть постоянным или изменяться во время движения, в зависимости от ситуации
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют
Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется
Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна
А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Подробнее о скорости: что же это такое
Связь полного ускорения точки с другими явлениями
Полное ускорение точки играет важную роль в описании движения объектов. Оно связано с другими физическими явлениями и позволяет более полно и точно описывать движение тела или системы точек.
Одно из главных свойств полного ускорения точки — это его направление. Оно всегда совпадает с направлением суммы всех сил, действующих на точку. То есть, если на точку одновременно действует несколько сил, то для определения полного ускорения необходимо сложить все эти силы по правилу параллелограмма.
Связь полного ускорения точки с другими явлениями проявляется в таких случаях, как движение тела под действием гравитационной силы, силы трения, внешних сил и других. Например, полное ускорение точки позволяет предсказать, как будет изменяться скорость и положение тела во времени, если известны все силы, действующие на него.
Также, полное ускорение точки связано с понятием силы инерции. Сила инерции возникает в результате изменения скорости тела и направлена противоположно полному ускорению. Она является проявлением закона инерции и описывает сопротивление тела изменению его состояния покоя или движения.
Связь полного ускорения точки с другими явлениями также проявляется в законе Ньютона о движении. Второй закон Ньютона устанавливает прямую связь между полным ускорением объекта и силой, действующей на него. Согласно этому закону, полное ускорение точки пропорционально силе и обратно пропорционально массе точки.
| Явление | Связь с полным ускорением точки |
|---|---|
| Гравитационная сила | Определяет направление и величину полного ускорения точки |
| Сила трения | Влияет на величину полного ускорения точки, снижая его |
| Внешние силы | Могут изменять направление и величину полного ускорения точки |
| Сила инерции | Является противоположной полному ускорению точки |
| Второй закон Ньютона | Устанавливает математическую связь между полным ускорением точки, массой и силой |
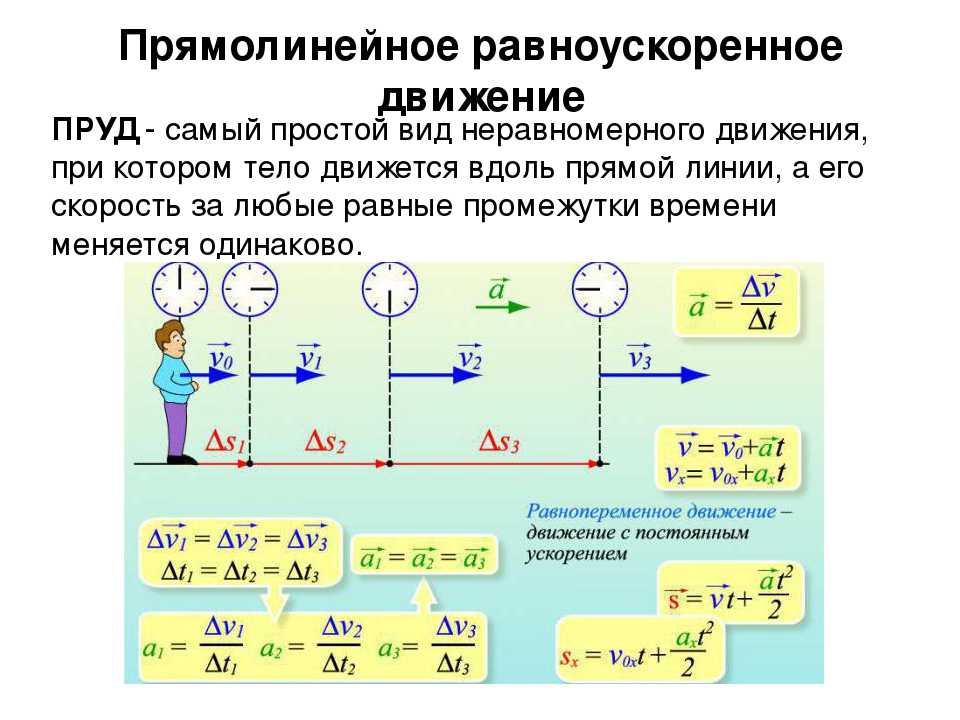
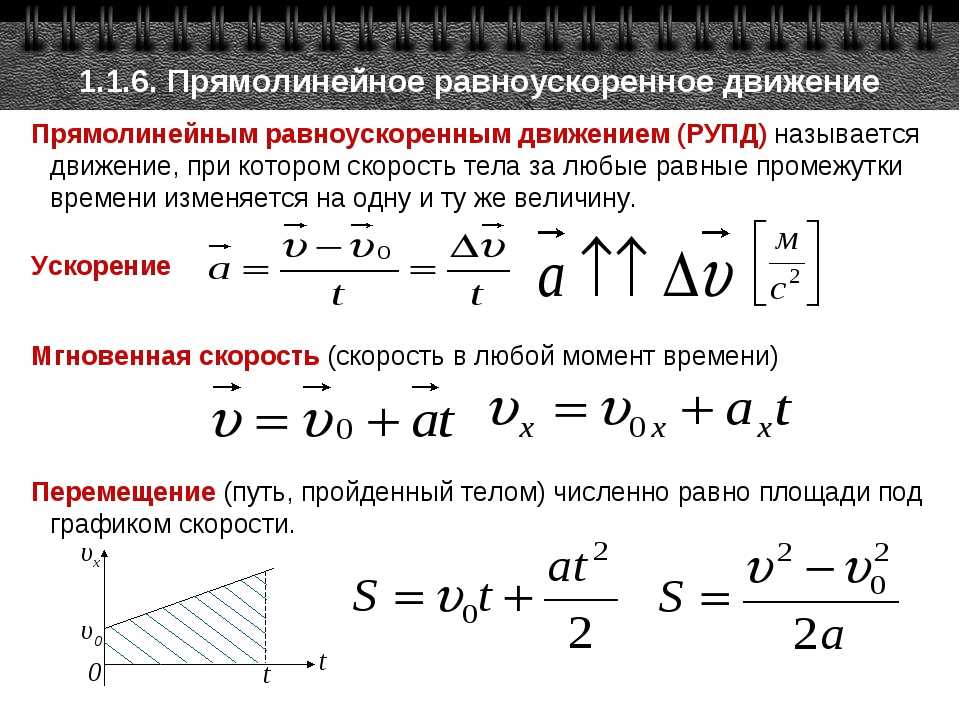
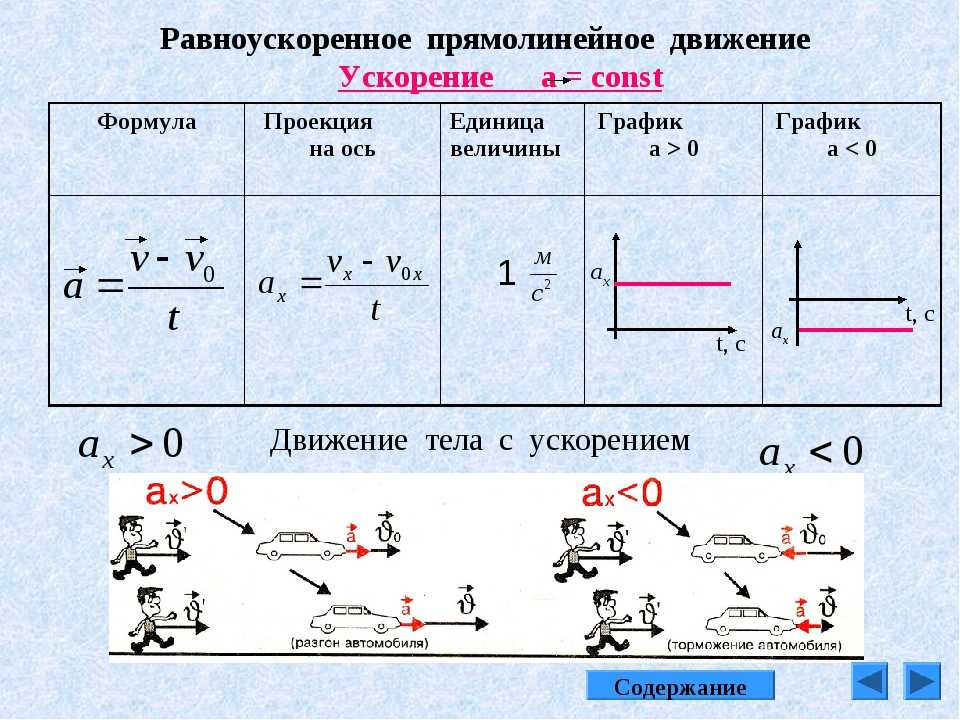
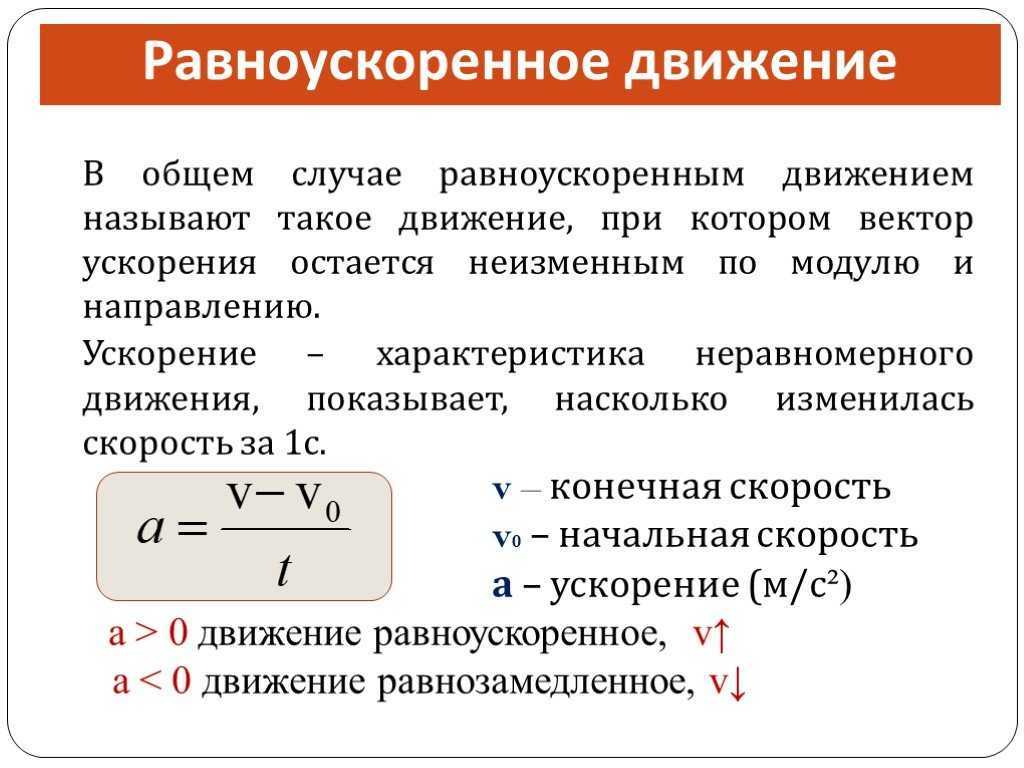
Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение – это движение по прямой, при котором тело движется с постоянным ускорением:
При движении с ускорением скорость может как увеличиваться, так и уменьшаться.
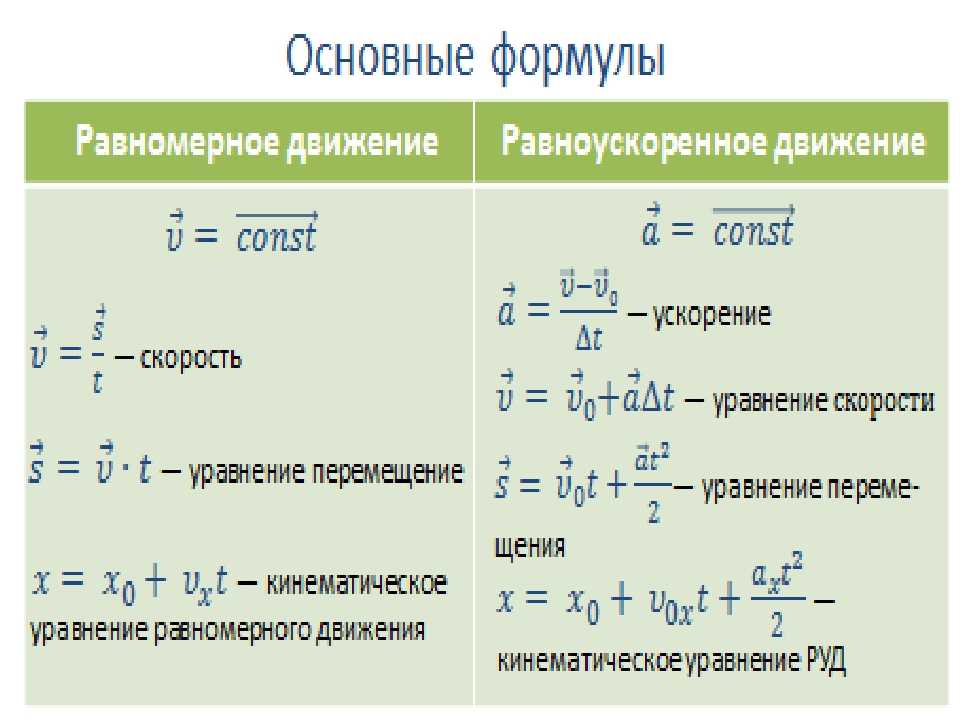
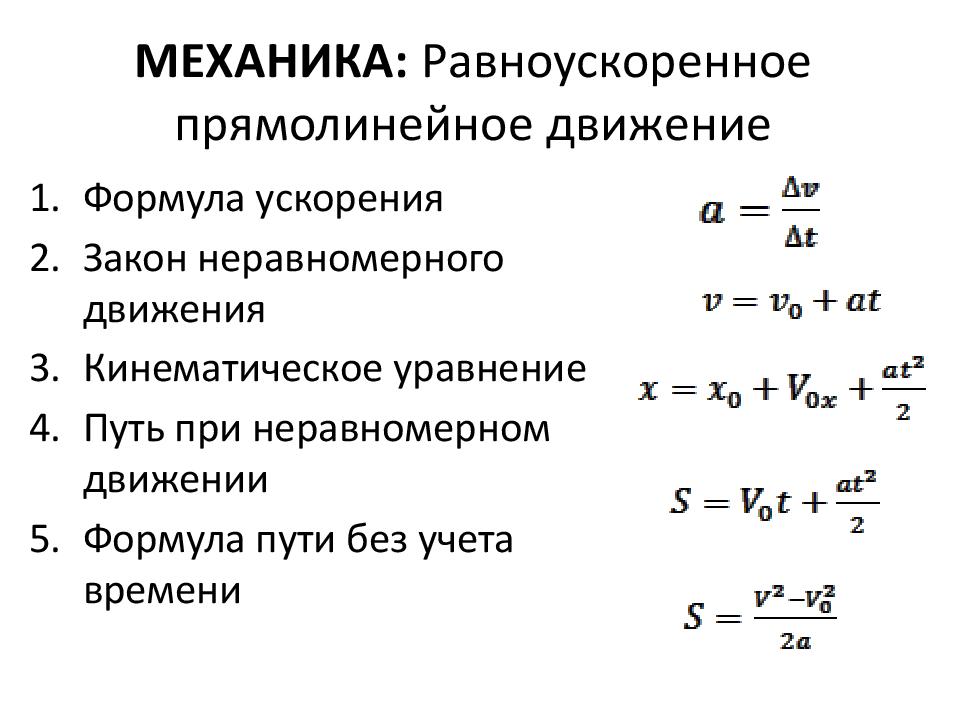
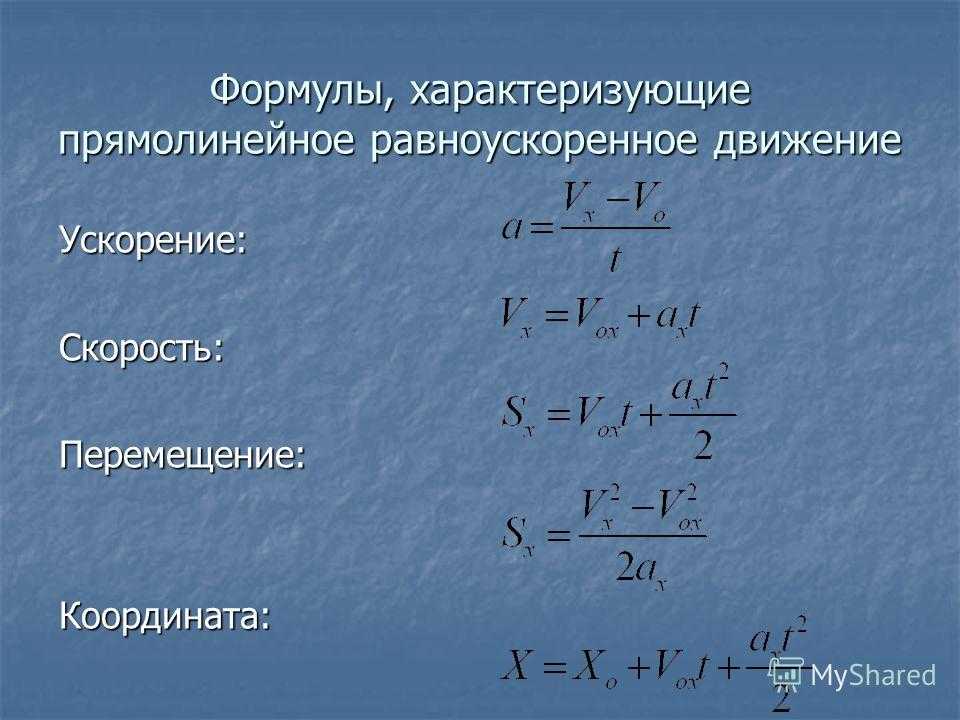
Скорость тела при равноускоренном движении рассчитывается по формуле:
При разгоне (в проекциях на ось ОХ):
При торможении (в проекциях на ось ОХ):
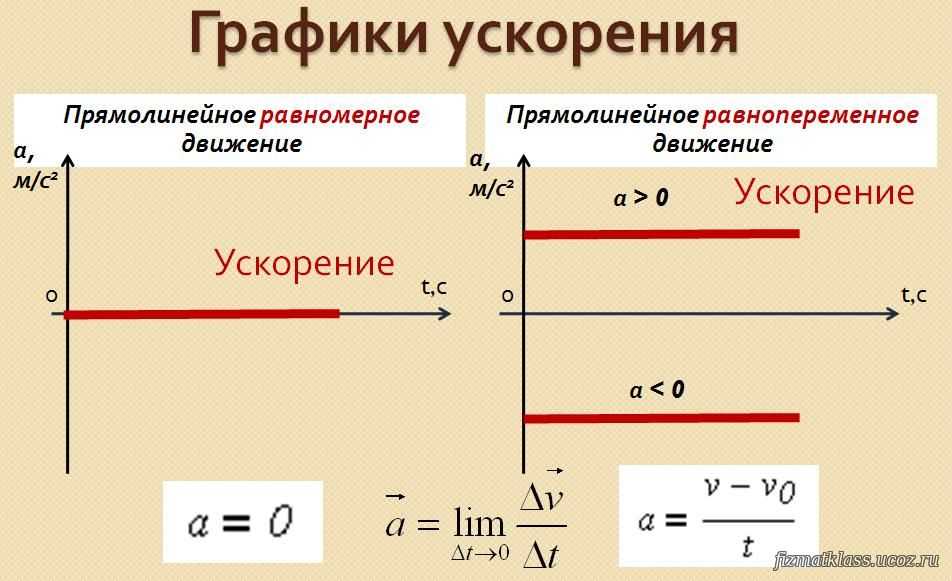
График ускорения (проекции ускорения) при равноускоренном движении представляет собой зависимость ускорения от времени:
График ускорения при равноускоренном движении – прямая, параллельная оси времени.
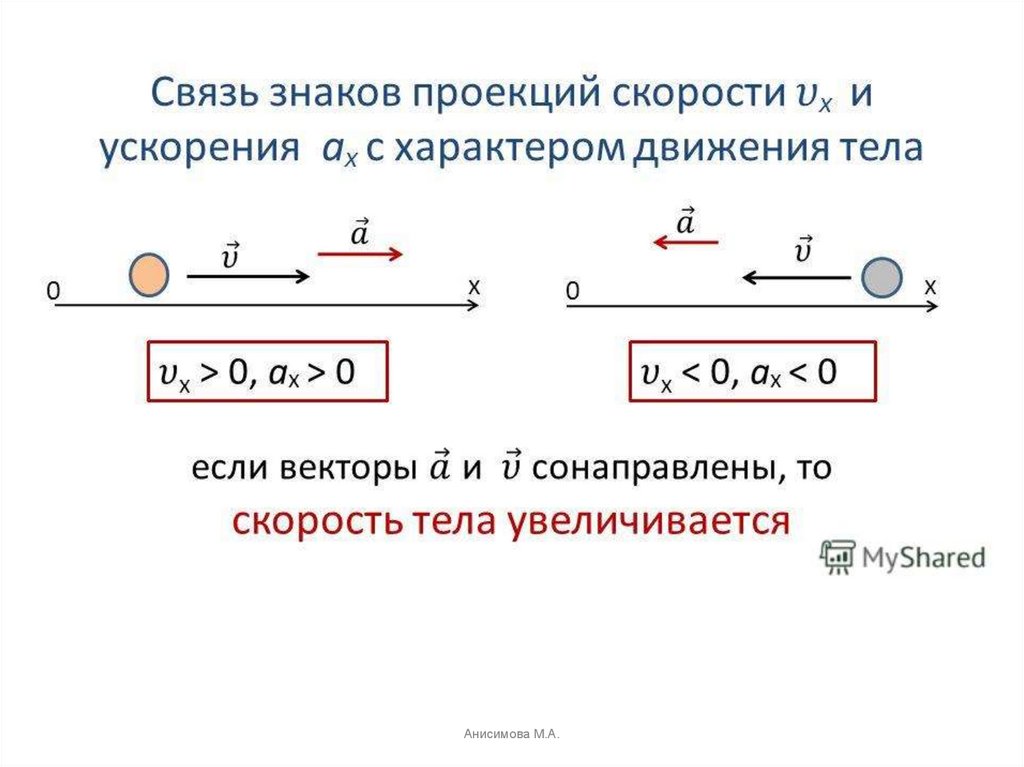
График 1 лежит над осью t, тело разгоняется, \( a_x \) > 0.
График 2 лежит под осью t, тело тормозит, \( a_x \) < 0.
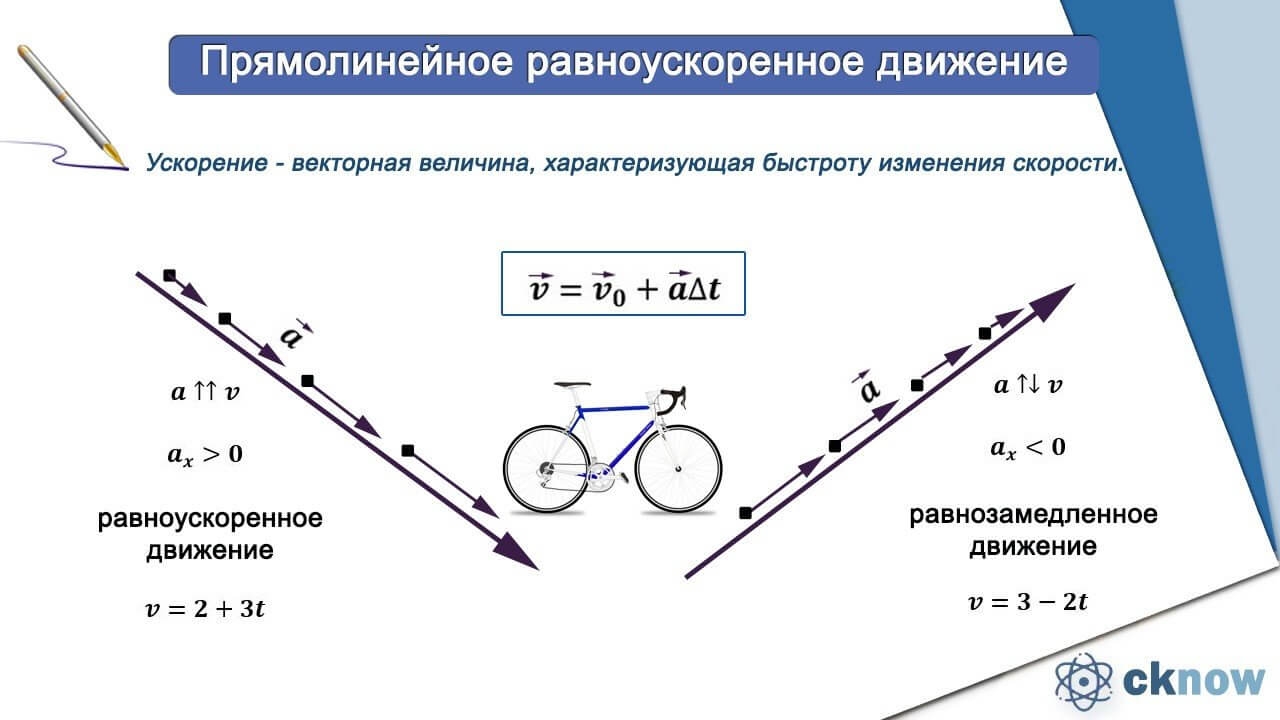
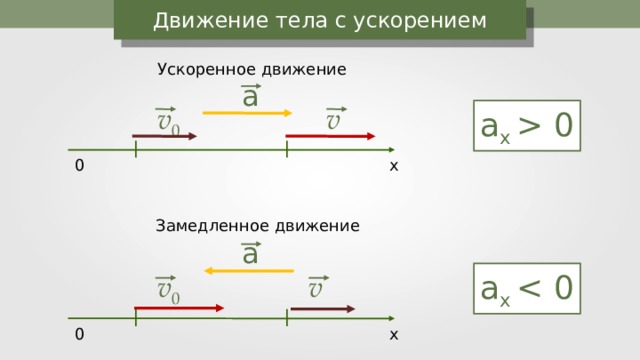
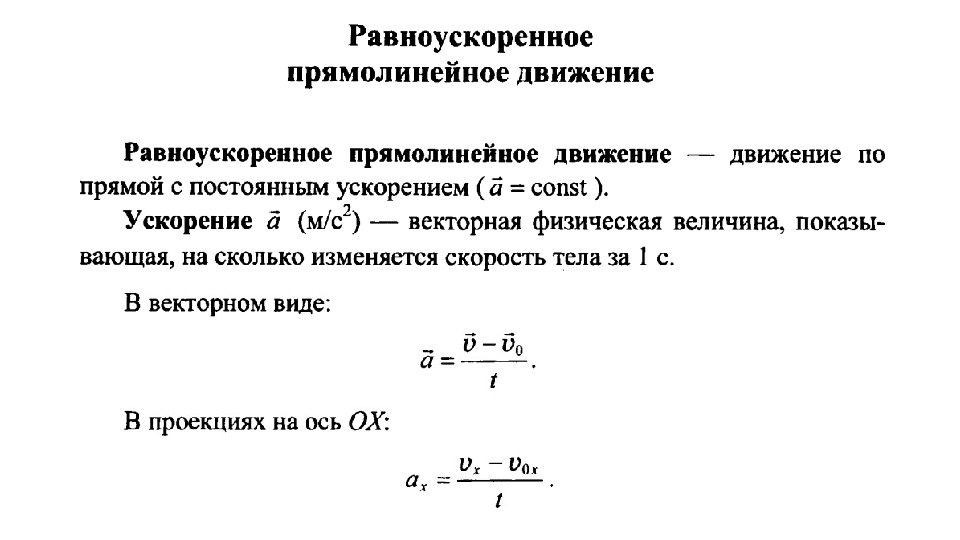
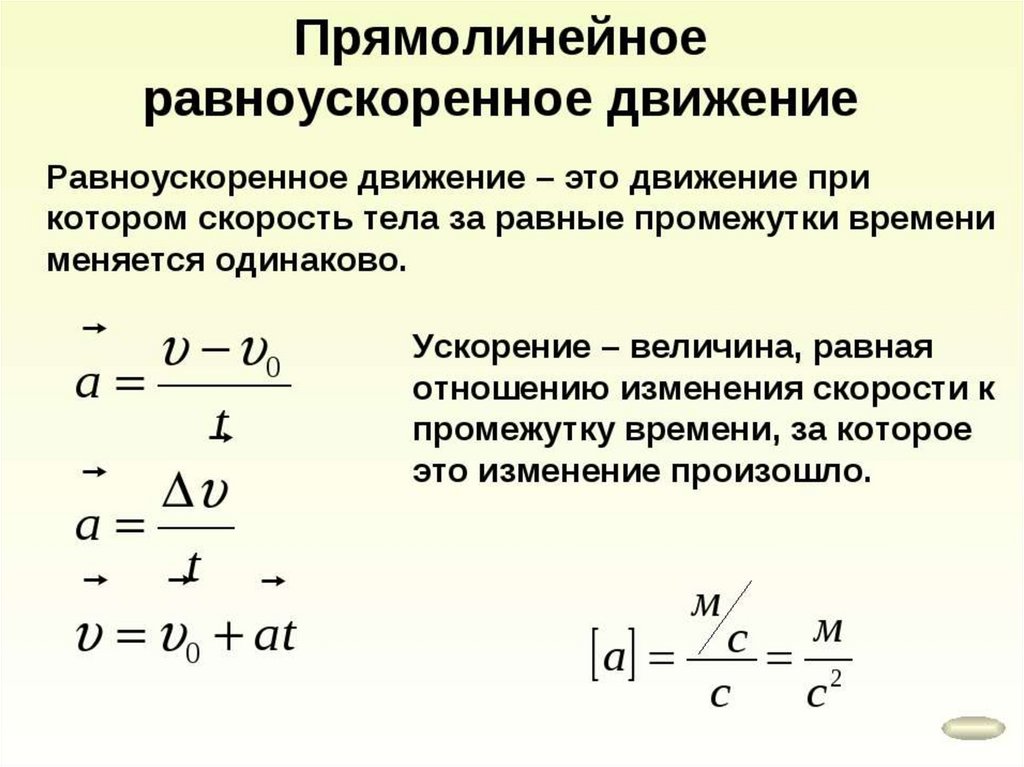
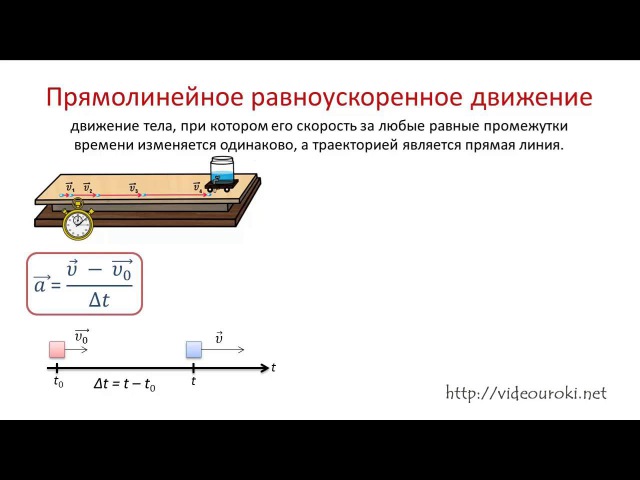
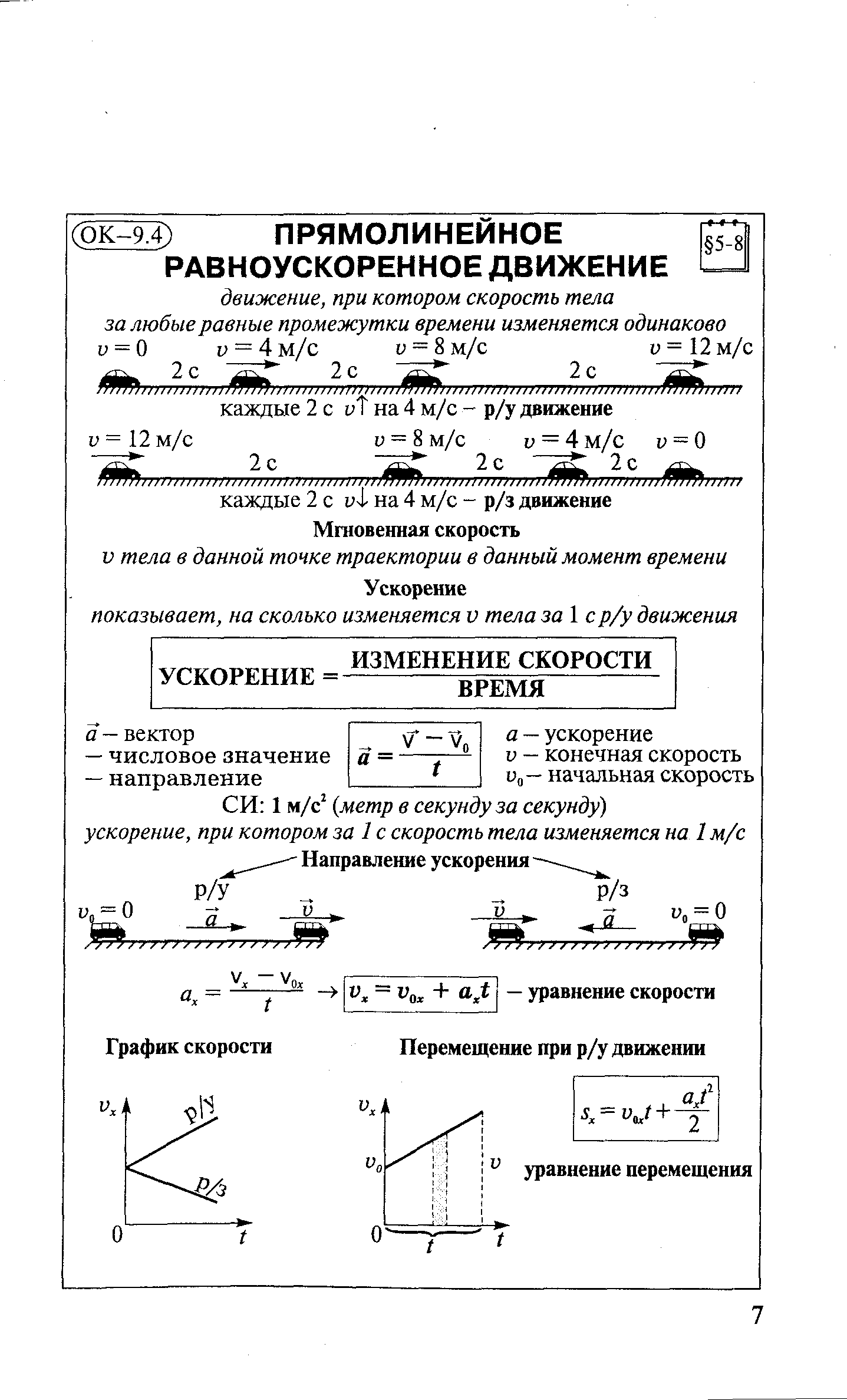
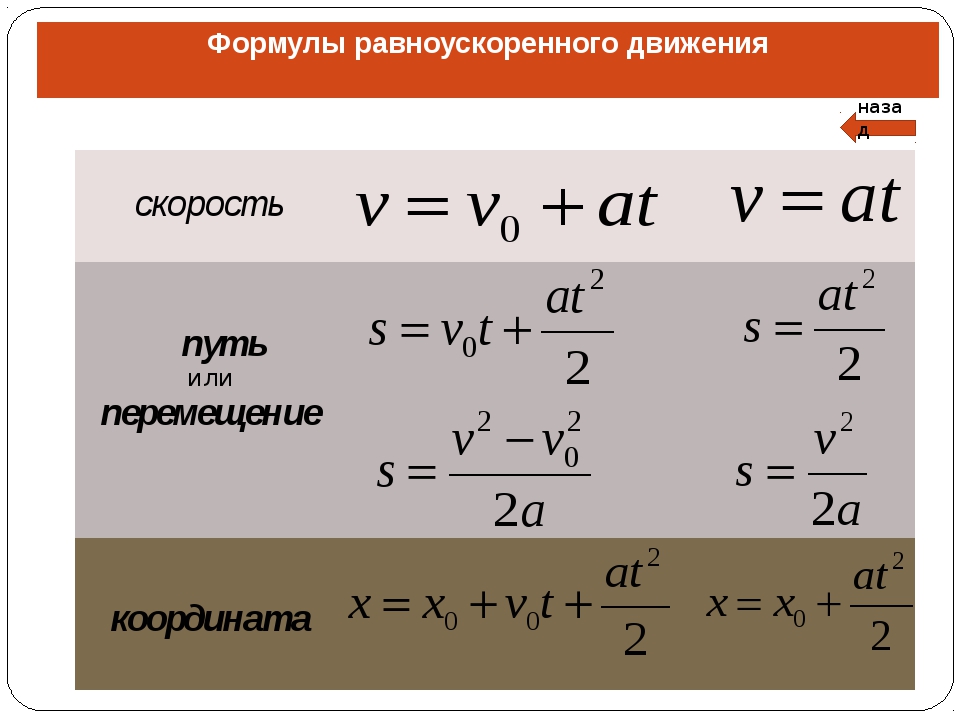
График скорости (проекции скорости) представляет собой зависимость скорости от времени:
График скорости при равноускоренном движении – прямая.
График 1 направлен вверх, тело движется равноускоренно в положительном направлении оси ОХ, \( v_{0x} \) > 0, \( a_x \) > 0.
График 2 направлен вниз, тело движется равнозамедленно в положительном направлении оси ОХ, \( v_{0x} \) > 0, \( a_x \) < 0,
График 3 направлен вниз, тело движется равноускоренно против оси ОХ, \( v_{0x} \) < 0, \( a_x \) < 0. По графику зависимости скорости от времени можно определить перемещение, пройденное телом за промежуток времени \( t_2-t_1 \). Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Перемещение при равноускоренном движении рассчитывается по формулам:
Перемещение в \( n \)-ую секунду при равноускоренном движении рассчитывается по формуле:
Координата тела при равноускоренном движении рассчитывается по формуле:
Что такое скорость?
На интуитивном уровне это понятно. Но давайте попробуем вникнуть поглубже. В чем всегда измеряется скорость? В автомобиле это обычно километры в час (км/ч), измеряется при помощи спидометра. То есть спидометр машины показывает, сколько километров проедет машина за один час, если не будет менять скорость. Точно так же скорость можно измерять в метрах в секунду (м/с), километрах в секунду (км/с) и т.д. Значит, если я умножу скорость на количество часов, которые едет машина с этой скоростью, то получу расстояние, пройденное машиной за это время. Можно записать в виде известной формулы движения с постоянной скоростью:
Итак, при движении с постоянной скоростью \(V\), можно посчитать расстояние \(S\), которое проходит тело за время \(t\).
Теперь давайте предположим, что машина двигается с постоянной скоростью 1 (м/с) влево из начальной точки с координатой \(x_0=3(м)\). Это означает, что машина за 1 секунду сдвинется на \(S=V*t=1*1=1(м)\) метр влево, то есть окажется в точке с координатой \(2\) (м). Через 2 секунды она пройдет расстояние \(S=V*t=1*2=2(м)\) и попадет в координату \(1\)(м), а через 6 секунд на \(S=V*t=1*6=6(м)\) и окажется в координате \(-3\)(м).
Скорость кроме величины еще имеет направление – в нашем случае это означает, что если машина едет вправо (туда же, куда направлена ось \(х\)), то скорость будет положительна, а если влево (в противоположную сторону направлению оси \(х\)), то скорость будет отрицательна.
Все, что имеет величину и направление, называется вектором. То есть скорость ни что иное, как вектор. Вектор – это ключевое понятие физики. Мы часто будем сталкиваться с величинами, у которых кроме числа есть еще и направление – ускорение, сила.
Немного отвлечемся, и обсудим, что такое вектор.
Формула переносного ускорения:
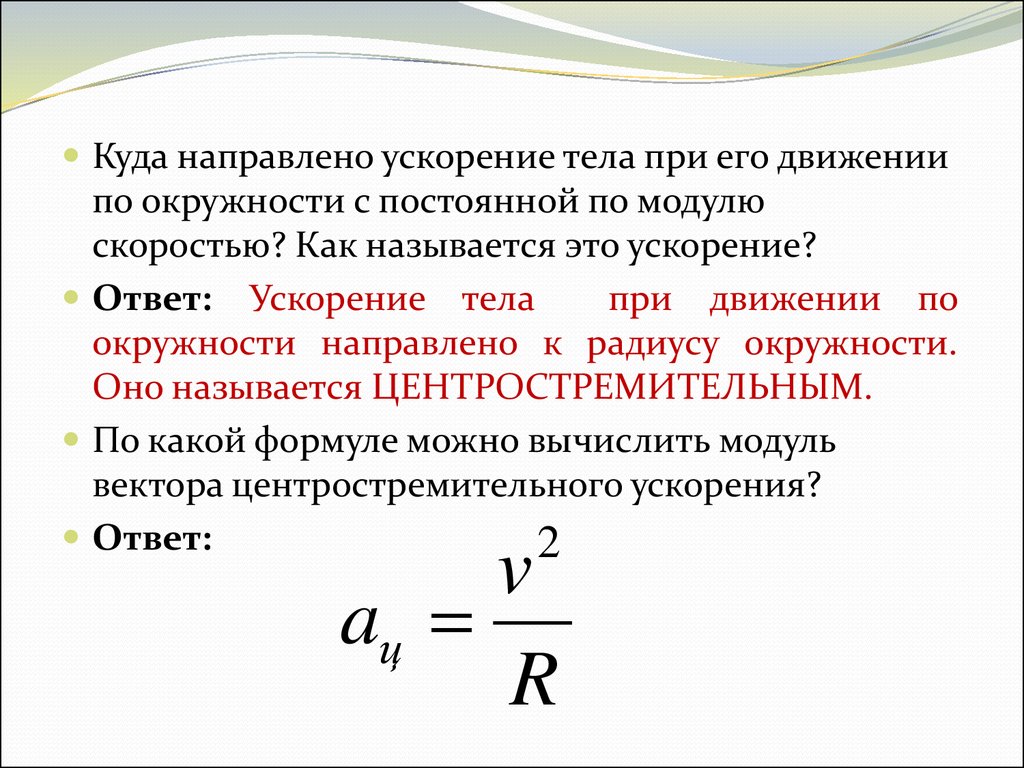
Переносное ускорение (также известное как центростремительное ускорение) представляет собой ускорение, возникающее при движении объекта по кривой траектории.
Формула для переносного ускорения определяется как:
где:
- ap — переносное ускорение;
- v — скорость объекта;
- r — радиус кривизны траектории.
Переносное ускорение направлено в сторону центра кривой траектории и всегда перпендикулярно к скорости объекта.
Например, при движении тела по окружности радиусом 2 метра со скоростью 5 метров в секунду, переносное ускорение будет равно:
Таким образом, при движении по окружности тело будет испытывать переносное ускорение величиной 12.5 м/с2.
Как модуль вектора ускорения влияет на изменение скорости
Чтобы лучше понять, как модуль вектора ускорения влияет на изменение скорости, рассмотрим пример. Представим, что у нас есть тело, движущееся со скоростью 10 м/с. Если модуль вектора ускорения равен 2 м/с², то это означает, что тело ускоряется на 2 м/с каждую секунду.
С учетом данного ускорения, можно рассчитать, как изменится скорость тела во время движения. Для этого нужно умножить модуль вектора ускорения на время. Например, если пройдет 3 секунды, то изменение скорости будет равно 6 м/с (2 м/с² * 3 секунды = 6 м/с).
Таким образом, модуль вектора ускорения определяет, насколько быстро изменяется скорость тела. Чем больше модуль ускорения, тем быстрее происходит изменение скорости. Если модуль вектора ускорения равен нулю, то скорость тела остается постоянной.
Изучение связи между модулем вектора ускорения и изменением скорости позволяет более точно прогнозировать движение тела и предсказывать его будущие параметры
Это важно во многих областях, включая физику, механику и инженерию
| Модуль вектора ускорения | Изменение скорости |
|---|---|
| 2 м/с² | 6 м/с |
| 4 м/с² | 12 м/с |
| 6 м/с² | 18 м/с |
Упражнения
Упражнение №1
За один и тот же промежуток времени $t$ модуль вектора скорости первого автомобиля изменился от $\upsilon_1$ до $\upsilon’$, а второго — от $\upsilon_2$ до $\upsilon’$ (векторы скорости изображены в одинаковом масштабе на рисунке 10). Какой из автомобилей двигался в указанный промежуток с большим ускорением? Скорость какого из них возрастала быстрее?
Рисунок 10. Векторы скоростей двух автомобилей
Посмотреть ответ
Скрыть
Ответ:
Давайте оценим, насколько изменились скорости автомобилей за один и тот же промежуток времени $t$.
Из рисунка 10 видно, что за время $t$ модуль скорости первого автомобиля увеличился на 4 единицы, а вот модуль скорости второго автомобиля увеличился всего на 2 единицы. Значит, первый автомобиль двигался с большим ускорением.
Так как первый автомобиль обладал большим ускорением, чем второй, то и его скорость возрастала быстрее.
Упражнение №2
Самолет, разгоняясь перед взлетом, в течение некоторого промежутка времени двигался равноускоренно. Каково было при этом ускорение самолета, если за $30 \space с$ его скорость возросла от $10 \frac{м}{с}$ до $55 \frac{м}{с}$?
Дано:$\upsilon_{0x} = 10 \frac{м}{с}$$\upsilon_x = 55 \frac{м}{с}$$t = 30 \space с$
$a_x — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Запишем формулу для расчета проекции ускорения и рассчитаем ее:$a_x = \frac{\upsilon_x \space − \space \upsilon_{0x}}{t}$,$a_x = \frac{55 \frac{м}{с} \space − \space 10 \frac{м}{с}}{30 \space с} = \frac{45 \frac{м}{с}}{30 \space с} = 1.5 \frac{м}{с^2}$.
Ответ: $a_x = 1.5 \frac{м}{с^2}$.
Упражнение №3
С каким ускорением двигался поезд на некотором участке пути, если за $12 \space с$ его скорость возросла на $6 \frac{м}{с}$?
Дано:$\Delta \upsilon_x = \upsilon_x \space − \space \upsilon_{0x} = 6 \frac{м}{с}$$t = 12 \space с$
$a_x — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Запишем формулу для расчета проекции ускорения и подставим в нее изменение скорости:$a_x = \frac{\upsilon_x \space − \space \upsilon_{0x}}{t} = \frac{\Delta \upsilon_x}{t}$.
Рассчитаем это ускорение:$a_x = \frac{6 \frac{м}{с}}{12 \space с} = 0.5 \frac{м}{с^2}$.


Ответ: $a_x = 0.5 \frac{м}{с^2}$.
Скорость — изменение — фаза
Скорость изменения фазы в зависимости от частоты равна скорости изменения усиления перпендикулярно к оси частоты.
Частота определяет скорость изменения фазы со dy / dt, поэтому при изменении частоты фаза ср напряжения х также будет непрерывно изменяться, так как вектор напряжения иг вследствие колебаний частоты будет то отставать, то опережать положение, в котором он должен был бы находиться при отсутствии модуляции частоты.
За большое время скорость изменения фазы v должна принимать все возможные значения.
Угловая частота — скорость изменения фазы тока, равная частоте синусоидального электрического тока, умноженной на 2л: ю 2л — 2л / Г, где v и Т — частота и период колебаний.
Отсюда видно, что скорость изменения фазы зависит от разности ( пш — — шс) и скорости изменения медленной фазы Ф в результате действия высокочастотного поля. В свою очередь и первый фактор содержит динамическую составляющую: помимо кинематического изменения фазы электрона относительно поля, вызванного начальным рассинхрониз-мом и) и пшс, вклад дает неизохронность вращения, т.е. зависимость шс от энергии. В целом определяет фазу вращения электрона относительно фазы высокочастотного поля.
Интересны данные, характеризующие скорость изменения фазы с ростом h в различных диапазонах.
Поскольку мгновенная частота ф ( скорость изменения фазы) есть случайная функция времени, фаза совершает случайные блуждания, т.е. имеет место диффузионный процесс.
В допплеровском методе измеряют разность скорости изменения фазы яастоты, принимаемой на станции, и стандартной яастоты.
|
Временная эволюция поверхностных мод, соответствующих 4. |
Из нижнего рисунка видно, что скорость изменения фазы для моды с наибольшей амплитудой ( т 2) возрастает до t 7 0, тогда как у моды с меньшей амплитудой ( т 3) она уменьшается.
Это значит, что — есть скорость изменения фазы колебания.
Это значит, что — — есть скорость изменения фазы колебания.
Итак, уравнение (7.30) связывает друг с другом скорость изменения фазы и разность потенциалов между берегами слабой связи. Оно обладает чрезвычайной общностью, так как следует из совершенно общих соотношений. Итак, соотношение (7.30) может применяться в самых различных ситуациях.
Это значит, что 2п / Т есть скорость изменения фазы колебания. Так же связаны между собой угловая частота колебаний и скорость изменения фазы колебаний и в том случае, когда эта скорость не остается постоянной, но при переменной скорости изменения фазы колебаний переменной оказывается и частота колебаний. Однако законы изменения фазы и частоты колебаний несколько различны. Для преобразования фазово-модулированного колебания в колебание, повторяющее модулирующее напряжение, необходимо применять фазовый детектор.
Также связаны между собой угловая частота колебаний и скорость изменения фазы колебаний и в том случае, когда эта скорость не остается постоянной. Следовательно, при переменной скоросги изменения фазы колебаний переменной оказыватся и частота колебаний. Однако законы изменения фазы и частоты колебаний оказываются несколько различными.