
Угловая скорость в спорте
Угловая скорость часто используется в спорте. Например, спортсмены уменьшают или увеличивают угловую скорость движения клюшки для гольфа, биты или ракетки, чтобы улучшить результаты. Угловая скорость связана с линейной скоростью так, что из всех точек на отрезке, вращающемся вокруг точки на этом отрезке, то есть вокруг центра вращения, самая отдаленная точка от этого центра движется с самой высокой линейной скоростью. Так, например, если клюшка для гольфа вращается, то конец этой клюшки, больше всего удаленный от центра вращения двигается с самой высокой линейной скоростью. В то же время все точки на этом отрезке движутся с одинаковой угловой скоростью. Поэтому удлиняя клюшку, биту, или ракетку, спортсмен также увеличивает линейную скорость, а соответственно скорость удара, передающуюся мячу, так что он может пролететь на большее расстояние. Укорачивая ракетку или клюшку, даже перехватив ее ниже, чем обычно, наоборот замедляют скорость удара.
При первобытнообщинном строе главными охотниками были мужчины
Спортсменам с более длинными руками и ногами удается добиться бо́льшей угловой скорости
У высоких людей с длинными конечностями есть преимущество в отношении линейной скорости. То есть, передвигая ноги с одинаковой угловой скоростью, они двигают ступни с более высокой линейной скоростью. То же происходит и с их руками. Такое преимущество может быть одной из причин того, что в первобытных обществах мужчины занимались охотой чаще, чем женщины. Вероятно, что из-за этого также в процессе эволюции выиграли более высокие люди. Длинные конечности помогали не только в беге, но и во время охоты — длинные руки бросали копья и камни с большей линейной скоростью. С другой стороны, длинные руки и ноги могут быть неудобством. Длинные конечности имеют больший вес и для их перемещения нужна дополнительная энергия. Кроме этого, когда человек быстро бежит, длинные ноги быстрее двигаются, а значит, при столкновении с препятствием удар будет сильнее, чем у людей с короткими ногами, которые двигаются с той же линейной скоростью.
В гимнастике, фигурном катании и нырянии также используют угловую скорость. Если спортсмен знает угловую скорость, то легко вычислить количество переворотов и других акробатических трюков во время прыжка. Во время кувырков спортсмены обычно прижимают ноги и руки как можно ближе к корпусу, чтобы уменьшить инерцию и увеличить ускорение, а значит и угловую скорость. С другой стороны, во время ныряния или приземления, судьи смотрят, как ровно спортсмен приземлился. На высокой скорости трудно регулировать направление полета, поэтому спортсмены специально замедляют угловую скорость, немного вытягивая от корпуса руки и ноги.
Спортсмены, которые занимаются метанием диска или молота, тоже контролируют линейную скорость с помощью угловой. Если просто бросить молот, не вращая его по кругу на длинной стальной проволоке, увеличивающей линейную скорость, то бросок будет не таким сильным, поэтому молот сначала раскручивают. Олимпийские спортсмены поворачиваются вокруг своей оси от трех до четырех раз, чтобы увеличить угловую скорость до максимально возможной.
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Законы, определяющие движение тела по окружности, аналогичны законам поступательного движения. Уравнения, описывающие вращательное движение, можно вывести из уравнений поступательного движения, произведя в последних следующие замены:
Связь частоты вращения с другими величинами
Частота вращения представляет собой важную физическую величину, которая имеет связь с различными аспектами нашей жизни и другими величинами в системе международных единиц измерений (СИ).
Одной из основных связей частоты вращения является ее зависимость от периода вращения. Период вращения определяется как время, за которое объект совершает один полный оборот вокруг своей оси. Частота вращения, в свою очередь, является обратной величиной периода вращения. То есть, чем больше частота вращения, тем меньше период вращения и наоборот.
Частота вращения также имеет связь с линейной скоростью движения объекта. Линейная скорость определяется как расстояние, пройденное объектом по окружности за единицу времени. Частота вращения и линейная скорость связаны между собой через радиус окружности и формулу для вычисления длины окружности (2πr). Чем больше частота вращения, тем больше линейная скорость движения объекта.
Связь между частотой вращения и другими величинами можно наблюдать также в различных научных и технических областях. Например, в механике и инженерии, частота вращения является одним из ключевых параметров при проектировании и расчете двигателей, роторов и других вращающихся систем. В электротехнике и электронике характеристики частоты вращения используются при моделировании и управлении электродвигателями и электронными компонентами.
Таким образом, частота вращения представляет собой важную величину, которая имеет связь с периодом вращения, линейной скоростью движения объекта и другими параметрами в различных научных и технических областях. Понимание и учет связи частоты вращения с другими величинами позволяют разрабатывать более эффективные и точные решения в промышленности, науке и технике.
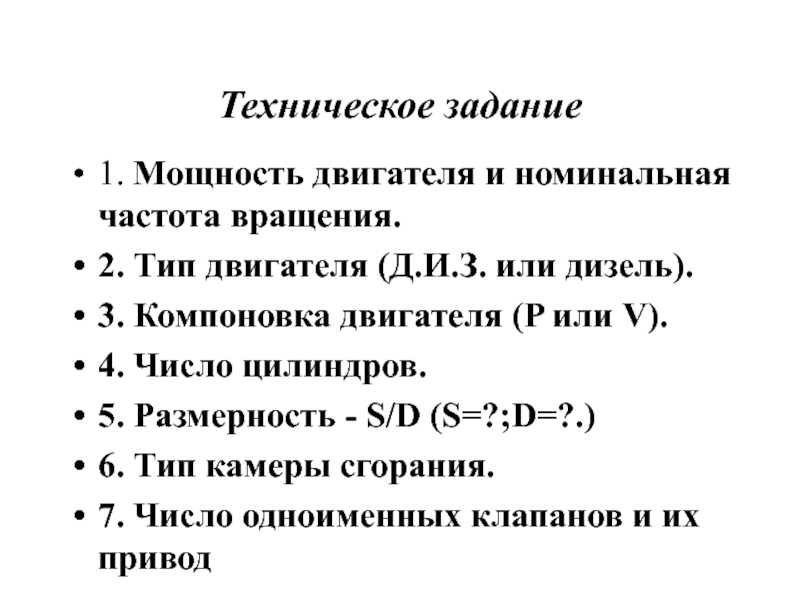
Что такое номинальные обороты двигателя?
Рисунок 5.3 — Диаграммы полезного момента М,
мощности тепловых потерь и температуры двигателя τ при работе в режимеS1
S2
—Режим кратковременной нагрузки — работа при постоянной нагрузке в течение заданного времени, меньшего, чем требуется для получения теплового равновесия, с последующим отключенным неподвижным состоянием, имеющим достаточную продолжительность для достижения машиной температуры окружающей среды. Характеризующей величиной является продолжительность кратковременной работы. Определяются следующие значения продолжительности кратковременной работы: 10, 30, 60 и 90 мин. Соответствующие режиму S2 диаграммы показаны на рис. 5.4.
Рисунок 5.4 — Диаграммы М,
и τ при работе двигателя в режиме S2
S3
—Режим повторно-кратковременной нагрузки — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов не достаточна для достижения теплового равновесия за время одного рабочего цикла, а наличие пускового тока существенно не влияет на нагрев. Соответствующие диаграммы показаны на рис. 5.5.
Для режима S3 характеризующей величиной является относительная продолжительность включения
, (5.10)
где —
период работы при номинальных условиях; — период отключенного неподвижного состояния (паузы);— продолжительность цикла.
Определяются следующие значения относительной продолжительности работы: 15, 25, 40 и 60 %. Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.
Рисунок 5.5 — Диаграммы М,
и τ при работе двигателя в режиме S3
S4
—Режим повторно-кратковременной нагрузки, включая пуск, — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время рабочего цикла. Диаграммы, соответствующие этому режиму, показаны на рис. 5.6.
Рисунок 5.6 — Диаграммы М
и τ при работе двигателя в режиме S4
S5 — Режим повторно-кратковременной нагрузки, включая электрическое торможение,
— последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке, быстрого электрического торможения и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время одного цикла. Соответствующие этому режиму диаграммы показаны на рис. 5.7.
Рисунок 5.7 — Диаграммы М,
и τ при работе двигателя в режиме S5
Для режимов работы S4 и S5 характеризующими величинами являются: относительная продолжительность включения, число включений в час, коэффициент инерции и постоянная кинетической энергии.
Под относительной продолжительностью включения понимается для режима S4
, (5.11)
, (5.12)
где, кроме известных величин, и — периоды соответственно пуска и торможения.
Продолжительность цикла, с, находится по формуле
, (5.13)
где — число включений (циклов) в час.
Под коэффициентом инерции понимается отношение суммы момента инерции двигателя и приведенного к валу двигателя момента инерции механизма к моменту инерции двигателя
. (5.14)


Постоянная кинетической энергии — отношение кинетической энергии, запасенной ротором при номинальной частоте вращения (угловой скорости), к номинальной полной мощности или произведению номинальных напряжения и тока в машинах постоянного тока.
Для режимов работы S4 и S5 определяются следующие значения величин: ПВ= 15, 25, 40 и 60 %; z= 30, 60, 90, 120, 180, 240 и 360 вкл./ч; —
1,2; 1,6; 2; 2,5 и 4.
S6
—Режим продолжительной работы при переменной нагрузке — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и на холостом ходу; длительность этих периодов недостаточна для достижения теплового равновесия за время одного рабочего цикла. Соответствующие диаграммы приведены на рис. 5.8.
Рисунок 5.8 — Диаграммы M, и τ при работе двигателя в режимеS6
Характеризующей величиной является продолжительность работы
, (5.15)
где — период работы на холостом ходу механизма.
Определяются следующие значения ПР = 15, 25, 40 и 60 %.
Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.
Примеры применения частоты вращения
1. Аэродинамика и авиация:
Частота вращения винта и ротора воздушных судов является ключевым параметром для определения их эффективности и мощности. Оптимальное соотношение между частотой вращения и скоростью полета позволяет достичь наилучшей производительности и экономичности. Кроме того, частота вращения используется для контроля и стабилизации полета, а также для предотвращения обратных взаимодействий между вибрацией и крылом самолета.
Частота вращения применяется в механических системах для управления и контроля вращающихся механизмов. Она используется для расчета скорости и ускорения вращения, а также для определения эффективности пневматических и гидравлических систем управления. Частота вращения также используется для определения граничных значений момента силы и скорости вращения в приводных системах, например, в электродвигателях и турбины.
3. Наука о материалах и инженерия поверхности:
Частота вращения применяется в процессах обработки материалов и инженерии поверхности. Она используется для определения оптимальных параметров вращения при шлифовке, полировке и сверлении материалов. Регулировка частоты вращения позволяет контролировать скорость удаления материала, минимизировать трение и повреждения поверхности, а также обеспечивать оптимальную качество обработки.
В итоге, частота вращения играет важную роль в оптимизации процессов и систем, а также в повышении эффективности и надежности технических устройств и механизмов.
Пригласить на тендер
Если у Вас идет тендер и нужны еще участники:
Выберите из списка инересующий вас вид работАудит промышленной безопасностиИдентификация и классификация ОПО, получение лицензии на эксплуатацию ОПОРазработка ПЛА, планов мероприятий, документации, связанной с готовностью предприятий к ГОЧС и пожарной безопасностиОбследование и экспертиза промышленной безопасности зданий и сооруженийРаботы на подъемных сооруженияхРаботы на объектах котлонадзора и энергетического оборудованияРаботы на объектах газового надзораРаботы на объектах химии и нефтехимииРаботы на объектах, связанных с транспортированием опасных веществРаботы на производствах по хранению и переработке растительного сырьяРаботы на металлургических литейных производствахРаботы на горнорудных производствахОценка соответствия лифтов, техническое освидетельствование лифтовРазработка обоснования безопасности опасного производственного объектаРазработка документации системы управления промышленной безопасностьюРазработка деклараций промышленной безопасностиРаботы на ведомственных объектах МО РФ, ФСБ и объектах ФСИН РоссииПроектированиеРемонтно-монтажные работыРемонт автомобильной грузоподъемной техникиЭлектроремонтные и электроизмерительные работыРазработка и производство приборов безопасности для промышленных объектовРазработка и изготовление нестандартных металлоизделий и оборудованияПредаттестационная подготовка по правилам и нормам безопасностиПрофессиональное обучение (рабочие профессии)Обучение по охране труда, пожарной безопасности и электробезопасности, теплоэнергетикеСпециальная оценка условий труда (СОУТ) и оценка профессиональных рисковАккредитация и аттестация в системе экспертизы промышленной безопасностиСертификация оборудования, декларирование соответствияДругие работыПовышение квалификации, профессиональная переподготовкаСкопируйте в это поле ссылку на Ваш тендер, для этого перейдите в браузер, откройте Вашу площадку, выделите и скопируйте строку адреса, затем вставьте в это поле. Если не получится напишите просто номер тендера и название площадки.персональных данных
Вращательное движение тела, формулы
При вращательном движении твердого тела все элементы его массы, не лежащие на оси вращения, совершают движение по окружности. Аналогично и материальная точка, находящаяся на расстоянии r > 0 от оси вращения, также совершает движение по окружности, как и любое тело, достаточно удаленное от оси вращения.



Линейное перемещение Sл, линейная скорость uл и линейное ускорение aл при таком движении связаны между собой обычными для поступательного движения соотношениями.
Кроме того, эти величины связаны определенным образом с угловым перемещением ?, угловой скоростью ? и угловым ускорением ?.
| Sл | перемещение тела по траектории, | метр |
|---|---|---|
| Uл | скорость тела при движении по траектории, | метр / секунда |
| aл | ускорение данного тела при движении по траектории, | метр / секунда2 |
| r | радиус траектории, | метр |
| d | диаметр траектории, | метр |
| ? | угловое перемещение тела, | радиан |
| ? | угловая скорость тела, | радиан / секунда |
| ? | угловое ускорение тела, | радиан / секунда2 |
| f | частота, | Герц |
Примечание:Формулы справедливы для постоянных, мгновенных и средних величин, во всех случаях движения тела по окружности.
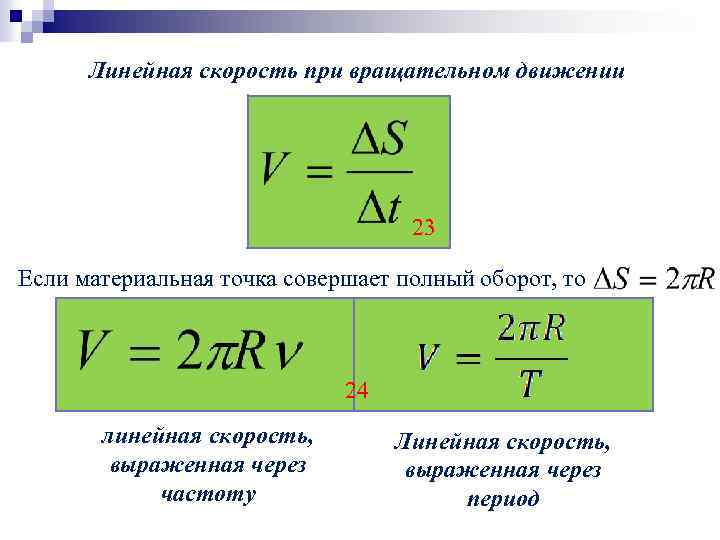
Переход от угловой к линейной скорости
Существует различие между линейной скоростью точки и угловой скоростью. При сравнении величин в выражениях, описывающих правила вращения, можно увидеть общее между этими двумя понятиями. Любая точка В, принадлежащая окружности с радиусом R, совершает путь, равный 2*π*R. При этом она делает один оборот. Учитывая, что время, необходимое для этого, есть период Т, модульное значение линейной скорости точки В находится следующим действием:
ν = 2*π*R / Т = 2*π*R* ν.
Так как ω = 2*π*ν, то получается:
ν = ω* R.
Следовательно, линейная скорость точки В тем больше, чем дальше от центра вращения находится точка.
К сведению. Если рассматривать в качестве такой точки города на широте Санкт-Петербурга, их линейная скорость относительно земной оси равна 233 м/с. Для объектов на экваторе – 465 м/с.
Числовое значение вектора ускорения точки В, движущейся равномерно, выражается через R и угловую скорость, таким образом:
а = ν2/ R, подставляя сюда ν = ω* R, получим: а = ν2/ R = ω2* R.
Это значит, чем больше радиус окружности, по которой движется точка В, тем больше значение её ускорения по модулю. Чем дальше расположена точка твердого тела от оси вращения, тем большее ускорение она имеет.
Поэтому можно вычислять ускорения, модули скоростей необходимых точек тел и их положений в любой момент времени.

Связь между угловой и линейной скоростями
Понимание и умение пользоваться расчётами и не путаться в определениях помогут на практике вычислениям линейной и угловой скоростей, а также свободно переходить при расчётах от одной величины к другой.
Примеры расчета числа оборотов в различных ситуациях
Вращающийся каток. Если каток радиусом 10 см вращается на 150 оборотов в минуту, то его число оборотов можно рассчитать по формуле N = f * 60, где N — число оборотов, f — частота вращения в Гц. Таким образом, N = 150 * 60 = 9000 об/мин.
Вращающийся шкив. Если шкив радиусом 20 см вращается на 200 оборотов в минуту, то его число оборотов можно рассчитать по формуле N = f * 60, где N — число оборотов, f — частота вращения в Гц. Таким образом, N = 200 * 60 = 12000 об/мин.
Вращающийся барабан. Если барабан радиусом 30 см вращается на 100 оборотов в минуту, то его число оборотов можно рассчитать по формуле N = f * 60, где N — число оборотов, f — частота вращения в Гц. Таким образом, N = 100 * 60 = 6000 об/мин.

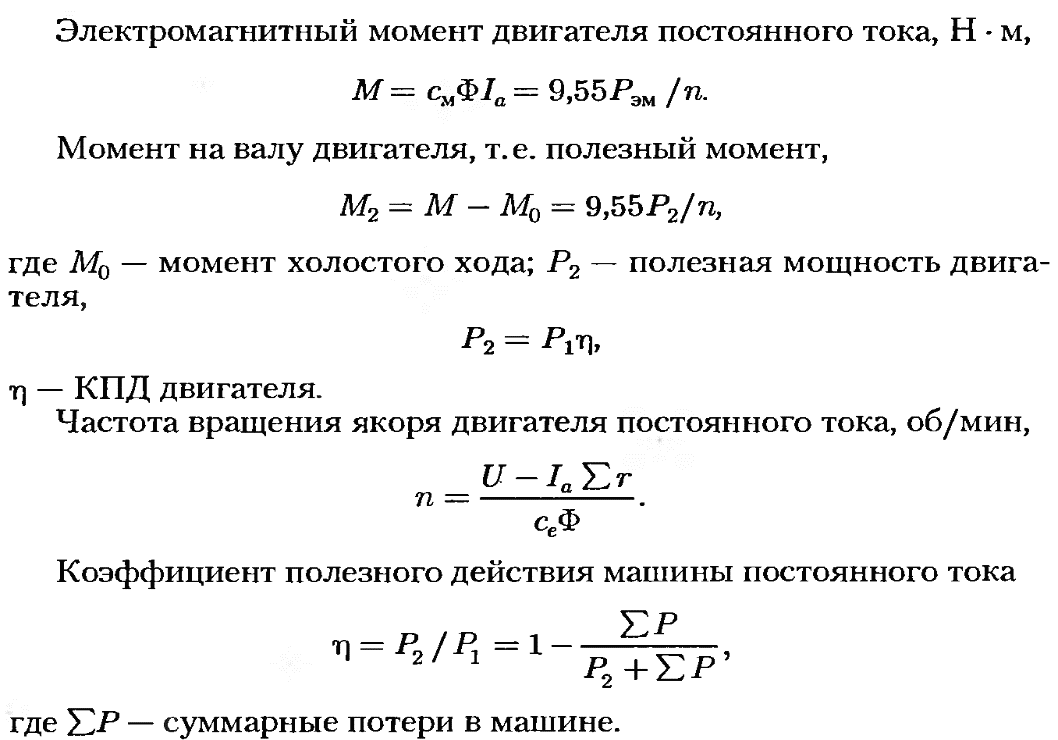
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
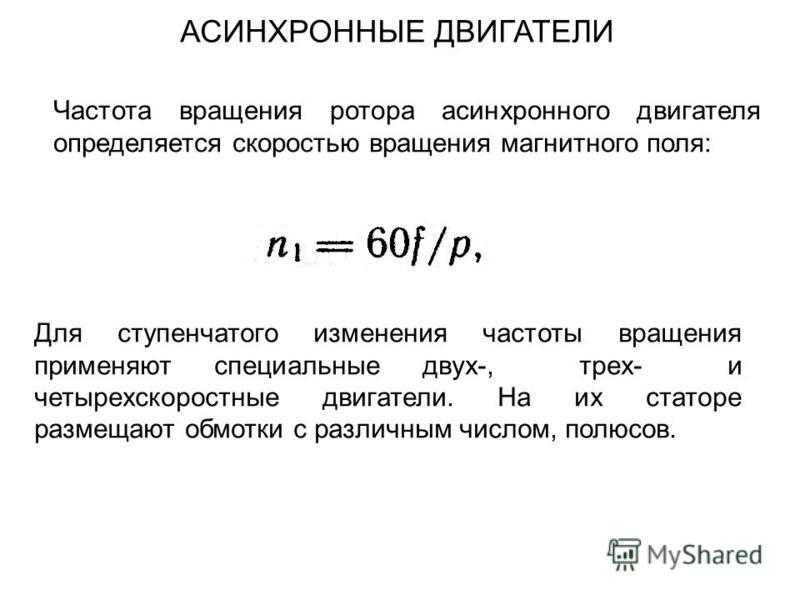
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
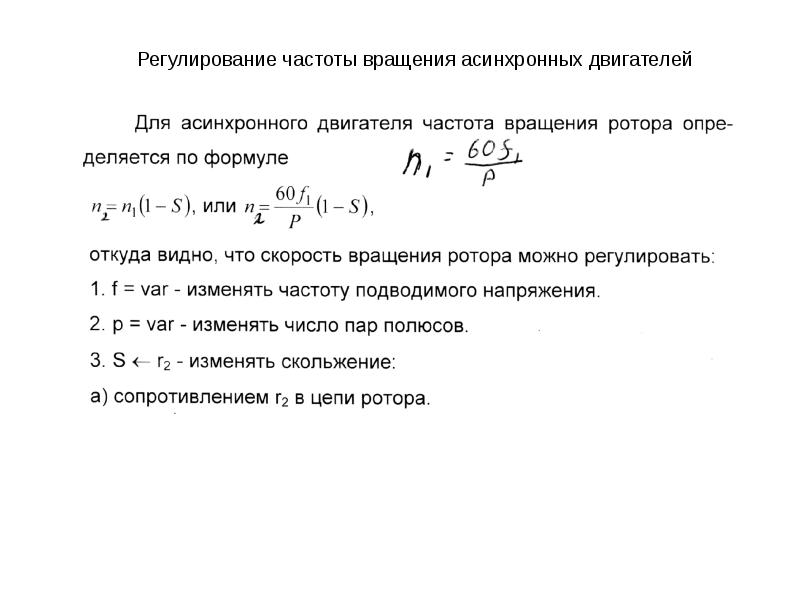
Скольжение
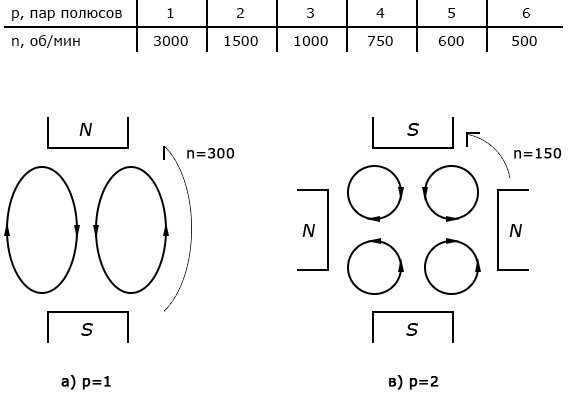
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
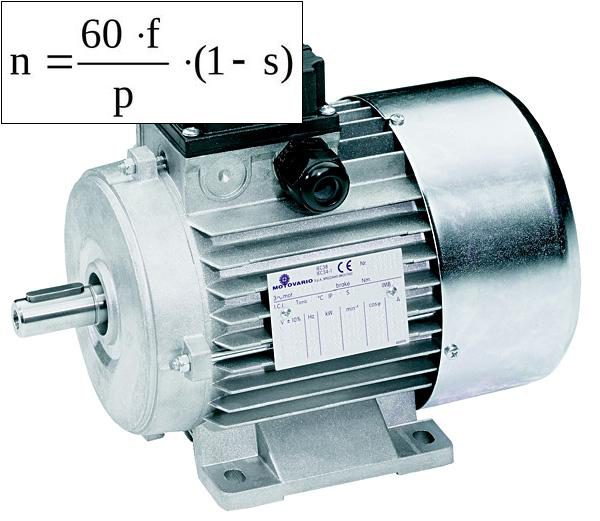
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
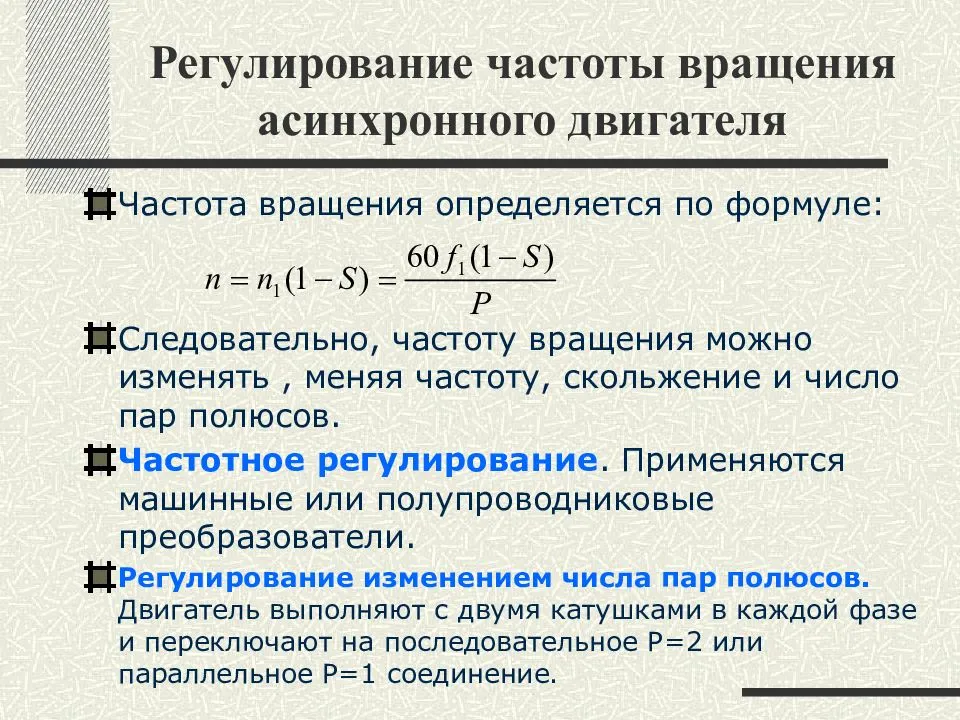
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Что такое частота обращения?
Частота обращения обычно измеряется в оборотах в минуту (об/мин) или в герцах (Гц), где 1 Гц равен одному циклу в секунду. Например, если предмет совершает 60 полных оборотов за одну минуту, его частота обращения равна 60 об/мин или 1 Гц.
Частота обращения находит применение в различных областях, например:
Машиностроение: При проектировании и использовании механизмов и двигателей важно знать и контролировать их частоту обращения для улучшения производительности и безопасности.
Электроника: В электрических и электронных системах, частота обращения может определяться частотой тока или напряжения и является важным параметром для правильного функционирования устройств.
Физика: Частота обращения вращающихся тел может быть использована для изучения законов динамики и момента инерции.
Частота обращения является важным понятием в знании и понимании движения вращательных объектов и находит широкое применение в различных областях науки и техники.
Генерирование переменного тока
Кроме стандартных генераторов, для производства переменного тока применяются инверторы и фазорасщепители.
Инвертор
Это устройство, с помощью которого из постоянного тока получают его переменный вид. В процессе этого величина выходного напряжения тоже меняется. Схема устройства представляет собой электронный генератор синусоидального импульсного напряжения периодического характера. Есть варианты инверторов, работающих с дискретным сигналом. Инверторы применяют для автономного питания оборудования от аккумуляторов постоянного напряжения.
Инвертор 12/220 В, мощностью 1500 Вт
Фазорасщепитель
Ещё один способ получить несколько фаз из какого-либо сигнала – это выполнить его расщепление на несколько фаз. Это делается с помощью фазорасщепителя. Принудительная обработка сигналов цифрового или аналогового формата используется, как в радиоэлектронике, так и в силовой электротехнике.
Для электроснабжения трёхфазных асинхронных двигателей применяют выполненный на их же базе фазорасщепитель. Для этого обмотки трёхфазного двигателя соединяют не «звездой», а иначе. Две катушки присоединяют между собой последовательно, третью – подключают к средней точке второй обмотки. Двигатель запускают, как однофазный, после разгона в его третьей обмотке наводится ЭДС.
Интересно. В случае расщепления фаз подобным методом сдвиг фаз между 2 и 3 обмоткой составляет не 1200, как должно быть в идеале, а 900.
Видео
Работы по переборке электродвигателя подходят к завершению. Приступаем к расчёту шкивов ремённой передачи станка. Немного терминологии по ремённой передаче.
Главными исходными данными у нас будут три значения. Первое значение это скорость вращения ротора (вала) электродвигателя 2790 оборотов в секунду. Второе и третье это скорости, которые необходимо получить на вторичном валу. Нас интересует два номинала 1800 и 3500 оборотов в минуту. Следовательно, будем делать шкив двухступенчатый.
Заметка! Для пуска трёхфазного электродвигателя мы будем использовать частотный преобразователь поэтому расчётные скорости вращения будут достоверными. В случае если пуск двигателя осуществляется при помощи конденсаторов, то значения скорости вращения ротора будут отличаться от номинального в меньшую сторону. И на этом этапе есть возможность свести погрешность к минимуму, внеся поправки. Но для этого придётся запустить двигатель, воспользоваться тахометром и замерить текущую скорость вращения вала.
Наши цели определены, переходим выбору типа ремня и к основному расчёту. Для каждого из выпускаемых ремней, не зависимо от типа (клиноременный, поликлиновидный или другой) есть ряд ключевых характеристик. Которые определяют рациональность применения в той или иной конструкции. Идеальным вариантом для большинства проектов будет использование поликлиновидного ремня. Название поликлиновидный получил за счет своей конфигурации, она типа длинных замкнутых борозд, расположенных по всей длине. Названия ремня происходит от греческого слова «поли», что означает множество. Эти борозды ещё называют по другому – рёбра или ручьи. Количество их может быть от трёх до двадцати.
Поликлиновидный ремень перед клиноременным имеет массу достоинств, таких как:
- благодаря хорошей гибкости возможна работа на малоразмерных шкивах. В зависимости от ремня минимальный диаметр может начинаться от десяти – двенадцати миллиметров;
- высокая тяговая способность ремня, следовательно рабочая скорость может достигать до 60 метров в секунду, против 20, максимум 35 метров в секунду у клиноременного;
- сила сцепления поликлинового ремня с плоским шкивом при угле обхвата свыше 133° приблизительно равна силе сцепления со шкивом с канавками, а с увеличением угла обхвата сила сцепления становится выше. Поэтому для приводов с передаточным отношением свыше трёх и углом обхвата малого шкива от 120° до 150° можно применять плоский (без канавок) больший шкив;
- благодаря легкому весу ремня уровни вибрации намного меньше.
Принимая во внимание все достоинства поликлиновидных ремней, мы будем использовать именно этот тип в наших конструкциях. Ниже приведена таблица пяти основных сечений самых распространённых поликлиновидных ремней (PH, PJ, PK, PL, PM)
| PJ | PK | PL | PM | ||
| Шаг ребер, S, мм | 1.6 | 2.34 | 3.56 | 4.7 | 9.4 |
| Высота ремня, H, мм | 2.7 | 4.0 | 5.4 | 9.0 | 14.2 |
| Нейтральный слой, h0, мм | 0.8 | 1.2 | 1.5 | 3.0 | 4.0 |
| Расстояние до нейтрального слоя, h, мм | 1.0 | 1.1 | 1.5 | 1.5 | 2.0 |
| Минимальный диаметр шкива, db, мм | 13 | 20 | 45 | 75 | 180 |
| Максимальная скорость, Vmax, м/с | 60 | 60 | 50 | 40 | 35 |
| Диапазон длины, L, мм | 1140…2404 | 356…2489 | 527…2550 | 991…2235 | 2286…16764 |
Рисунок схематичного обозначения элементов поликлиновидного ремня в разрезе.
Нагрузка насосов и типы нагрузки электродвигателя
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.

Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя
Watch this video on YouTube
Значение частоты вращения и частоты обращения в инженерии
Частота вращения и частота обращения играют ключевую роль в различных инженерных областях. Они представляют собой важные параметры, которые позволяют оптимизировать работу механизмов и систем.
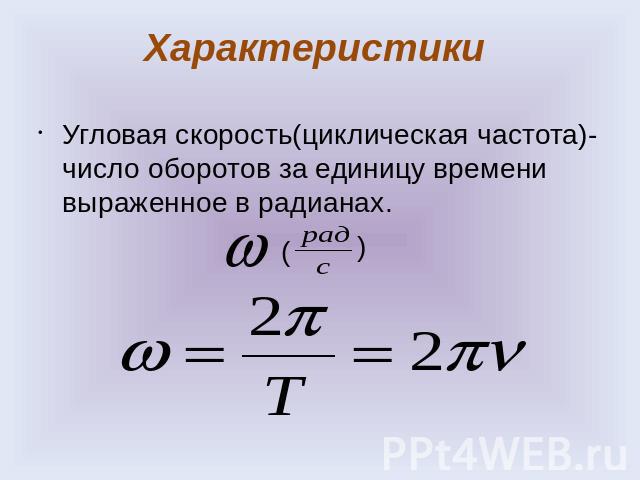
Частота вращения определяет скорость вращения объекта или системы вокруг своей оси. Она измеряется в оборотах в минуту (об/мин) или радианах в секунду (рад/с). Частота вращения является фундаментальным показателем для оценки производительности механизмов и определения рабочих характеристик двигателей.
Частота обращения определяет количество оборотов системы за единицу времени относительно некоторой точки или оси. Она также измеряется в оборотах в минуту или радианах в секунду. Частота обращения применяется для анализа динамики механизмов и определения их периодичности и стабильности.
Значение частоты вращения и частоты обращения в инженерии заключается в том, что они позволяют определить оптимальные рабочие режимы системы, обеспечить энергоэффективность и повысить производительность. Они также помогают исследовать динамику механизмов, выявлять и устранять возможные проблемы, связанные с вибрацией и износом.