
Законы Ньютона для «чайников»: объяснение 1, 2, 3 закона, пример с формулами
- 22 февраля 2021 г.
- 13 минут
- 785 530
Мы уже говорили об основах классической механики. Настала пора поговорить о них подробнее и затронуть в обсуждении чуть больше, чем просто основу. В этой статье мы подробно разберем основные законы классической механики. Как вы уже догадались, речь пойдет о законах Ньютона.
Ежедневная рассылка с полезной информацией для студентов всех направлений – на нашем телеграм-канале.
Основные законы классической механики Исаак Ньютон (1642-1727) собрал и опубликовал в 1687 году. Три знаменитых закона были включены в труд, который назывался «Математические начала натуральной философии».
Был долго этот мир глубокой тьмой окутан Да будет свет, и тут явился Ньютон.
(Эпиграмма 18-го века)
Но сатана недолго ждал реванша — Пришел Эйнштейн, и стало все как раньше.
(Эпиграмма 20-го века)
Что стало, когда пришел Эйнштейн, читайте в отдельном материале про релятивистскую динамику. А мы пока приведем формулировки и примеры решения задач на каждый закон Ньютона.
Исаак Ньютон: мифы и факты из жизни
На момент публикации своего основного труда Ньютону было 45 лет. За свою долгую жизнь ученый внес огромный вклад в науку, заложив фундамент современной физики и определив ее развитие на годы вперед.
Он занимался не только механикой, но и оптикой, химией и другими науками, неплохо рисовал и писал стихи. Неудивительно, что личность Ньютона окружена множеством легенд.
Ниже приведены некоторые факты и мифы из жизни И. Ньютона. Сразу уточним, что миф – это не достоверная информация. Однако мы допускаем, что мифы и легенды не появляются сами по себе и что-то из перечисленного вполне может оказаться правдой.
В самом конце предлагаем посмотреть видеоурок на тему «Законы Ньютона».
Иван Колобков, известный также как Джони. Маркетолог, аналитик и копирайтер компании Zaochnik. Подающий надежды молодой писатель. Питает любовь к физике, раритетным вещам и творчеству Ч. Буковски.
Области применения принципа суперпозиции сил
Принцип суперпозиции сил является одним из основных принципов механики. Он заключается в том, что если на тело действует несколько сил, то их влияние на тело можно представить как сумму влияний каждой силы в отдельности. Принцип суперпозиции сил широко используется в различных областях физики и инженерии.
Механика:
В механике принцип суперпозиции сил используется для решения задач по движению тел под влиянием нескольких сил. Это позволяет определить итоговое движение тела и его параметры, такие как скорость и ускорение.
Электричество:
В электротехнике принцип суперпозиции сил используется для анализа электрических цепей, в которых действуют несколько источников напряжения или тока. С помощью этого принципа можно рассчитать ток или напряжение на любой точке цепи.
Акустика:
В акустике принцип суперпозиции сил используется для анализа волн звука, проходящих через сложные среды. С помощью этого принципа можно определить форму и параметры конечной волны, которая складывается из всех волн, проходящих через среду.
Оптика:
В оптике принцип суперпозиции сил используется для анализа интерференции света, которая возникает при пересечении двух или более волн. С помощью этого принципа можно определить форму и параметры конечной волны, которая складывается из всех волн, пересекающихся в точке интерференции.
Закон сохранения механической энергии
Полная механическая энергия – это энергия, равная сумме кинетической и потенциальной энергий.
Обозначение – \( W (E) \), единицы измерения – Дж.
Закон сохранения механической энергии
В замкнутой системе тел, между которыми действуют только консервативные силы, механическая энергия сохраняется, т. е. не изменяется с течением времени:
Если между телами системы действуют кроме сил тяготения и упругости другие силы, например сила трения или сопротивления, действие которых приводит к превращению механической энергии в тепловую, то в такой системе тел закон сохранения механической энергии не выполняется.
Важно!
В случае, если кроме консервативных сил (тяжести, упругости, тяготения) существуют еще и неконсервативные силы, например сила трения, а также внешние силы, то
Теорема о кинетической энергии справедлива для сил любой природы:
Если на систему тел действуют неконсервативные и внешние силы, то изменение полной энергии равно сумме работ неконсервативных и внешних сил.
Закон сохранения и превращения энергии
Энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой или передается от одного тела к другому.
Устойчивое и неустойчивое равновесие: различия и примеры
В физике равновесие – это состояние, в котором объект находится в покое или движется со стабильной скоростью без внешнего воздействия. Равновесие может быть устойчивым или неустойчивым в зависимости от поведения объекта при возмущении его положения.

Устойчивое равновесие – это состояние, в котором объект возвращает свое положение равновесия после малых возмущений. То есть, если объект смещается от своего исходного положения, действуют восстанавливающие силы, которые приводят его обратно в равновесие.
- Пример устойчивого равновесия можно найти в реальной жизни, когда шар — это объект равновесия, а ворота могут служить восстанавливающей силой. Если шар незначительно отклоняется от положения равновесия, сила притяжения ворот приведет его обратно в исходное положение.
- Другим примером является каток, находящийся в устойчивом положении на плоской поверхности. Если каток немного отклоняется от равновесия, сила трения восстанавливает его положение, и каток возвращается в исходное положение.
- Также, устойчивое равновесие можно наблюдать в планетарных системах, где гравитационное взаимодействие орбитальных тел приводит их к равновесию, и любое незначительное возмущение приведет их обратно к исходным орбитам.
Неустойчивое равновесие – это состояние, в котором объект не возвращается в исходное положение после малых возмущений, а вместо этого отклоняется еще больше. Если объект находится в неустойчивом равновесии и его сместить из исходного положения, будет существовать некое ускорение, которое усилит отклонение и приведет к дальнейшему движению.
- Примером неустойчивого равновесия может служить вертикально поставленная ручка. Небольшое отклонение ручки из вертикального положения вызовет падение ручки, так как центр тяжести ручки окажется вне базы поддержки.
- Еще одним примером является верхний положение насыпи при прохождении велосипеда. Малейшее отклонение балансировки приведет к падению велосипеда с насыпи.
- Также, неустойчивым равновесием можно считать шар, находящийся на вершине горы. Если шар немного сдвинется, даже на самую малую величину, сила тяжести приведет его к падению вниз.
Понимание различия между устойчивым и неустойчивым равновесием важно во многих областях физики, так как позволяет предсказывать и объяснять поведение объектов при возмущении их состояния равновесия
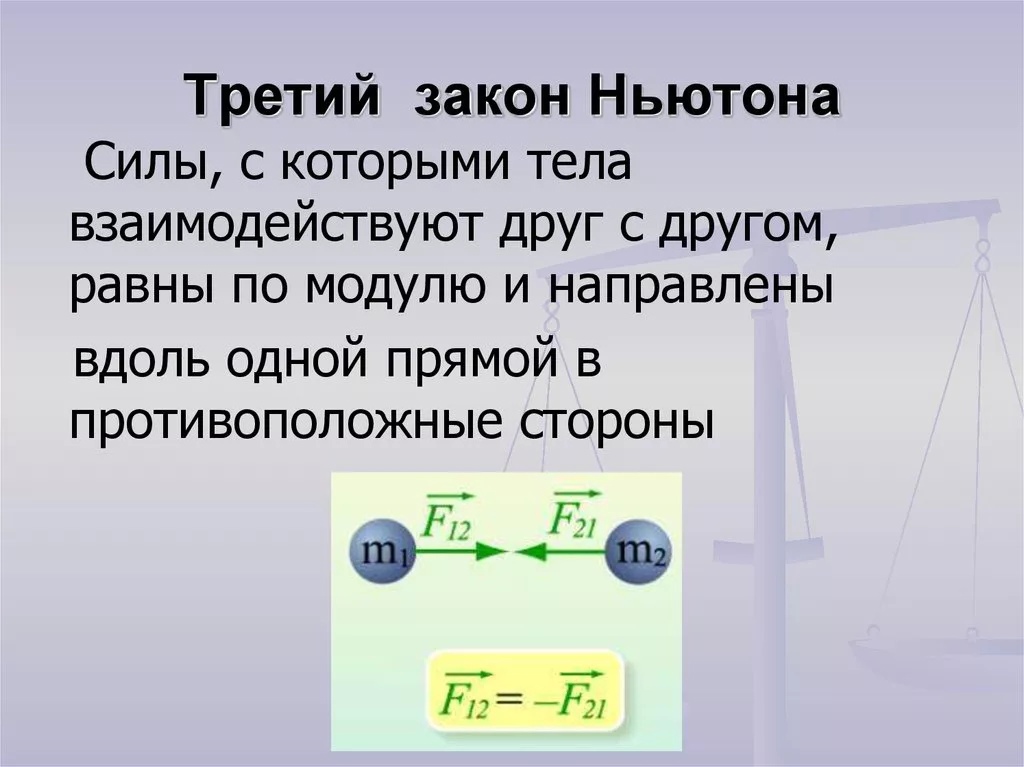
Третий закон Ньютона
По второму закону Ньютона можно рассчитать ускорение движущегося тела и при известных начальных условиях найти его скорость и координаты в любой момент времени.
Но на практике недостаточно знать закон движения, например, автомобиля
Важно знать также силу, с которой он действует на опору, чтобы рассчитать, например, конструкцию моста, по которому автомобиль движется. Следовательно, необходимо установить, как соотносятся между собой силы, с которыми действуют друг на друга тела при взаимодействии.
Проведем некоторые опыты и исследуем этот вопрос
Закрепим в двух штативах динамометры, соединенные крючками (рис. 47, а). Если потянуть в горизонтальном направлении поочередно за один динамометр, за другой или за оба вместе, то в каждом опыте показания приборов равны. Значит, силы, с которыми динамометры действуют друг на друга, равны по модулю и по условиям опыта направлены в противоположные стороны.
Присоединим к одному динамометру кусок железа, а к другому — магнит. При взаимодействии железа и магнита на динамометрах также установятся одинаковые показания (рис. 47, б).
Рис. 47
Рассмотрим другой опыт. Пусть на гладких горизонтальных рельсах, закрепленных на неподвижном столе, расположены две тележки одинаковой массы. Закрепим на одной из них моторчик, на ось которого при его работе будет наматываться нить, привязанная к другой тележке. На тележку без моторчика поставим дополнительную гирю, масса которой равна массе моторчика, чтобы общие массы тележек были равны.
При работающем моторчике обе тележки устремляются навстречу друг другу с одинаковыми ускорениями. Их можно рассчитать, измерив пройденный путь и время его прохождения (рис. 48, а).
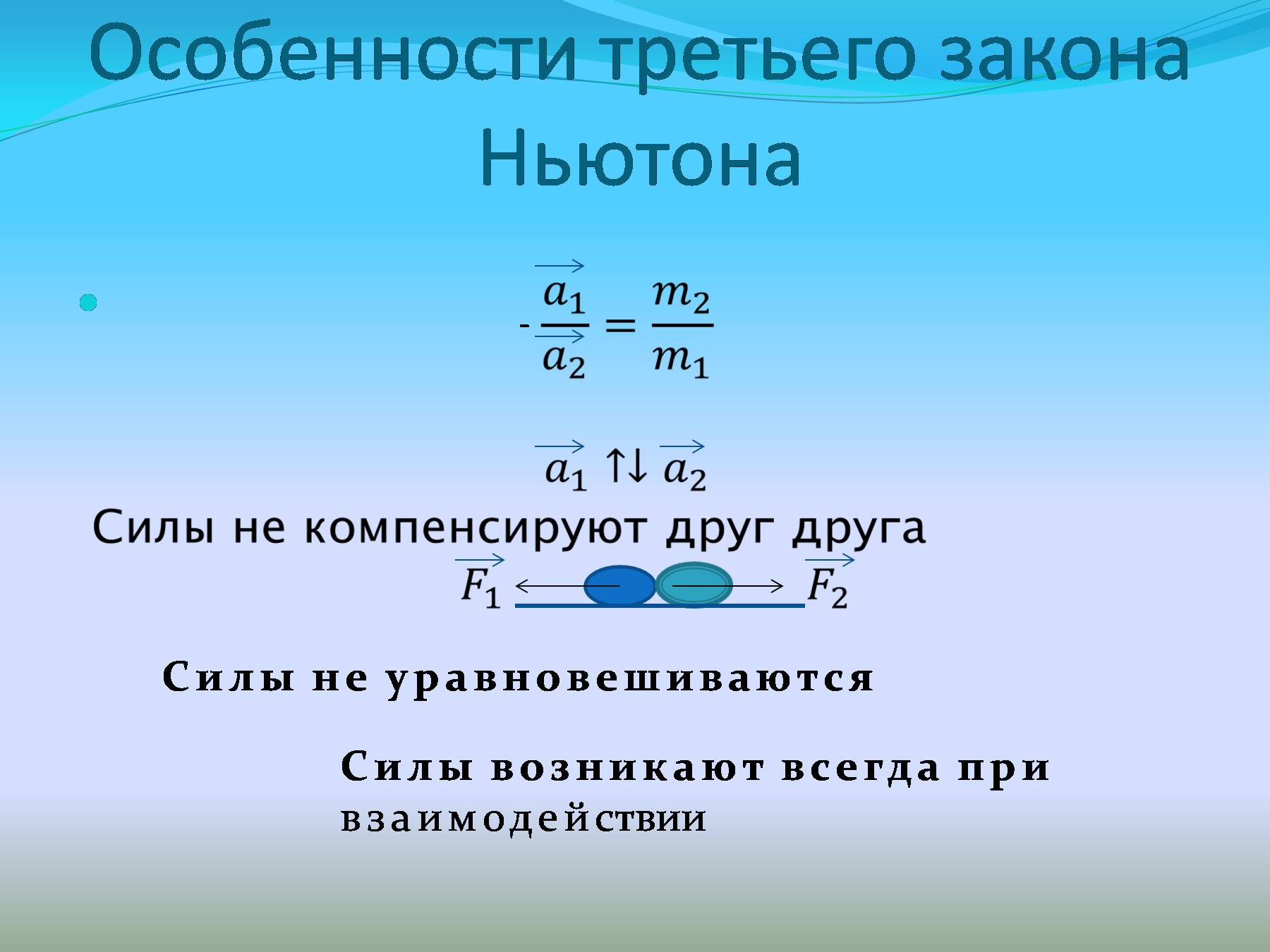
Если массу одной из тележек изменить, то обратно пропорционально массе изменится ее ускорение (рис. 48, б). А для модулей ускорений двух тележек, если их массы различны, выполняется следующее соотношение:
или m1a1=m2a2
Если учесть, что по второму закону Ньютона m1a1=F1 и m2a2 = F2, а ускорения тележек направлены в противоположные стороны, то можно записать:
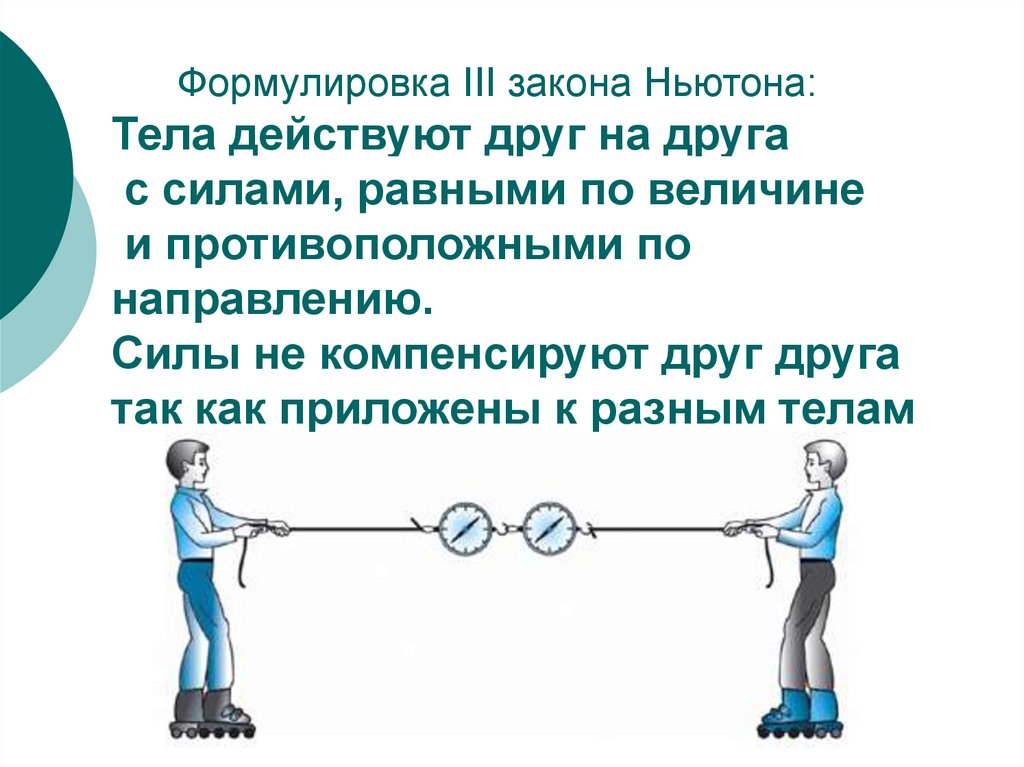
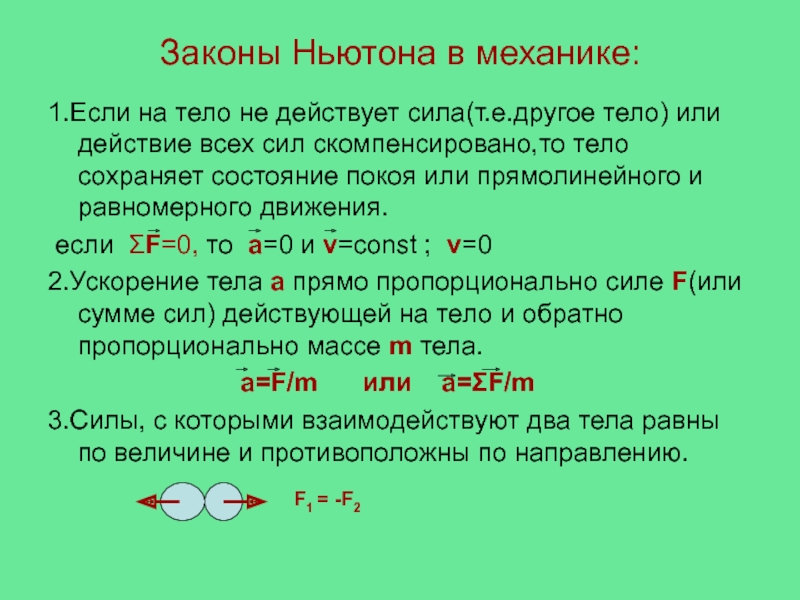
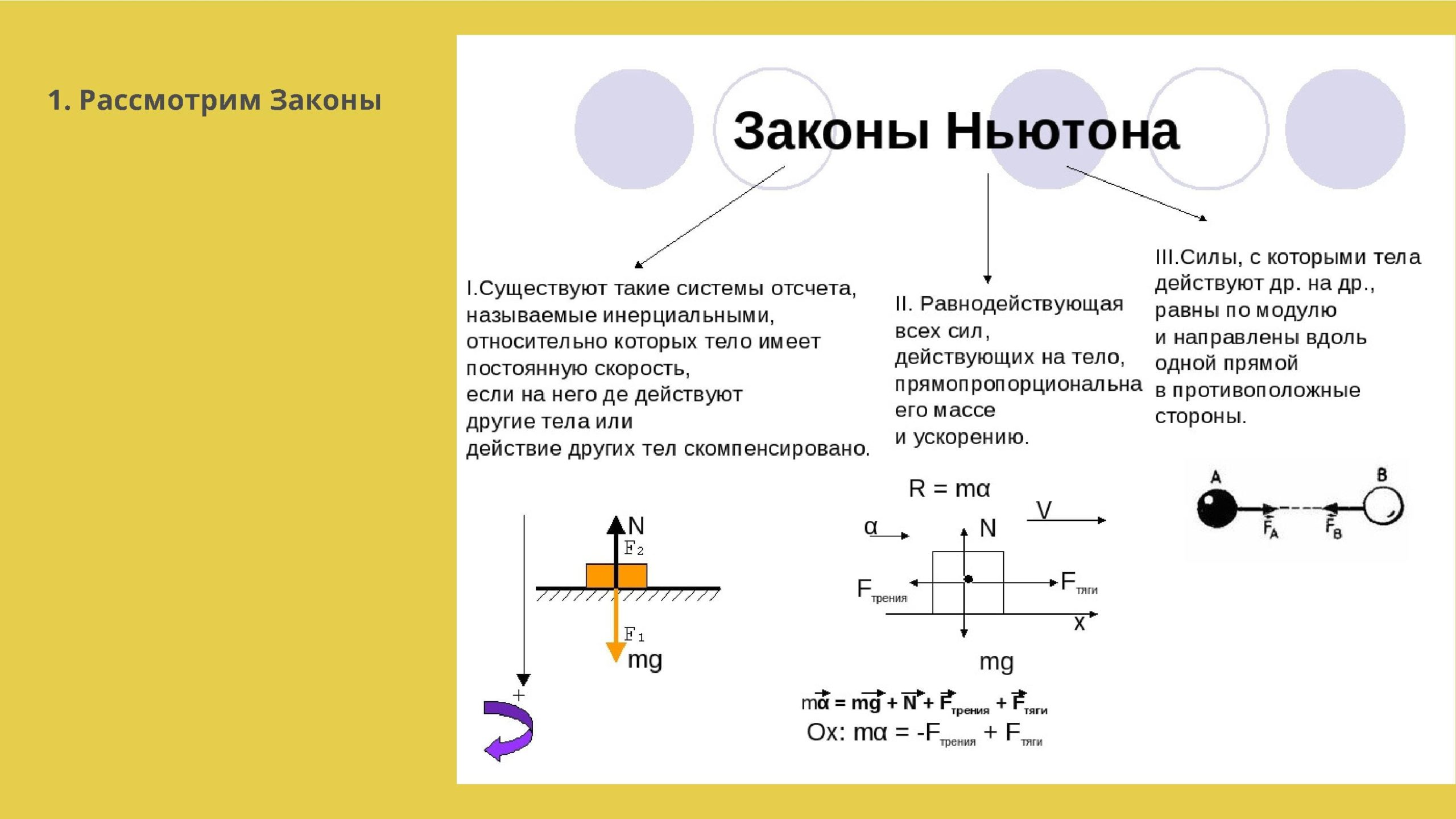
Какие бы примеры взаимодействия тел не рассматривались, всегда выполняется установленный Ньютоном третий закон:силы, с которыми два тела действуют друг на друга, одной природы, равны по модулю, противоположны по направлению и направлены вдоль одной прямой.
Рис. 48
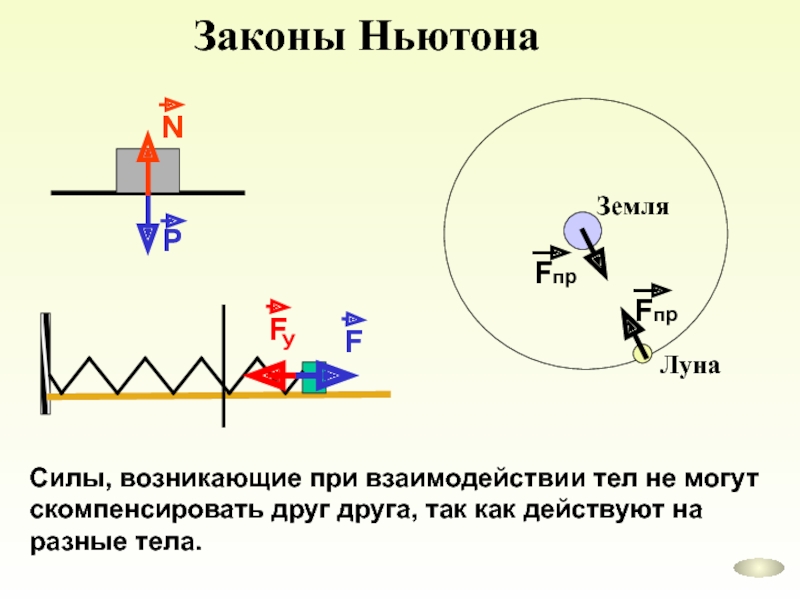
Из третьего закона Ньютона следует, что силы всегда возникают парами и при взаимодействии тел равноправны.
Значит, например, с какой силой каждого человека притягивает наша огромная планета Земля, с такой же силой и человек притягивает Землю.
Третий закон Ньютона выполняется для любых взаимодействий, в том числе и для столкновений тел.
Почему, например, в районах больших аэропортов принимаются специальные меры для удаления из воздушного пространства любых птиц? Столкновение даже небольшой птицы с обшивкой самолета, стеклом иллюминатора или частью двигателя может вызвать их разрушение.
Ускорение и деформация тел при взаимодействии зависят от их массы и от того, с какими другими телами есть еще взаимодействие в данный момент.
Рассмотрим, например, взаимодействие одинаковых бильярдных шаров при различных условиях (рис. 49). Шар, лежащий посередине стола, взаимодействует с опорой и притягивается Землей. Причем силы тяжести и упругости перпендикулярны плоскости стола и равны по модулю. Можно показать, что при центральном ударе по одному шару такого же второго шара бильярдные шары практически обмениваются скоростями (рис. 50).
|
Рис. 49 |
Рис. 50 |
Если шар лежит у бортика стола, взаимодействуя добавочно и с ним (см. рис. 50), то результат удара совершенно другой. Хотя при этом массы тел не изменились, и скорость движущегося шара перед взаимодействием такая же.
Экспериментально установлено: в каких бы разнообразных взаимодействиях тело не участвовало, третий закон Ньютона выполняется для каждой пары взаимодействующих тел.
Таким образом, третий закон Ньютона утверждает, что силы возникают всегда парами. Любое взаимодействие необходимо характеризовать двумя силами, которые хотя и равны по модулю, но противоположны по направлению и действуют на разные тела.
Главные выводы
- Силы взаимодействия двух тел равны по величине, противоположно направлены и приложены к разным телам.
- Третий закон Ньютона выполняется в инерциальных системах отсчета.
- Результат взаимодействия двух тел зависит от того, в каких еще взаимодействиях каждое из них участвует.
Понятие компенсации сил в разных отраслях
Компенсация сил — это процесс, при котором действие одной силы или эффекта смягчается или компенсируется другой силой или эффектом. Она используется в разных отраслях для различных целей. Вот несколько примеров, как компенсация сил применяется в разных отраслях:
-
Аэрокосмическая промышленность:
- В авиации и ракетостроении компенсация гравитационных сил позволяет удерживать равновесие и сохранять стабильность в полете.
- В космических аппаратах компенсация силы тяжести позволяет астронавтам проводить исследования в условиях невесомости.
-
Машиностроение:
В производстве машин и оборудования компенсация сил трения помогает уменьшить износ деталей и повысить эффективность работы механизмов.
-
Энергетика:
- В энергетической отрасли компенсация силы тяжести позволяет строить высокие электрические столбы и башни для передачи энергии.
- В ветроэнергетике компенсация силы ветра позволяет устанавливать ветрогенераторы на высоте, где скорость ветра выше и производство энергии эффективнее.
-
Робототехника:
В робототехнике компенсация силы тяжести позволяет роботам оперировать в разных положениях без потери равновесия.
-
Автомобильная промышленность:
В автомобильной промышленности компенсация сил подвески позволяет улучшить управляемость автомобиля и комфорт во время движения.
Таким образом, компенсация сил является важным инструментом в различных отраслях, позволяя достичь стабильности, эффективности и комфорта при взаимодействии с различными силами и эффектами.
Примеры применения компенсации сил
Принцип компенсации сил широко применяется в различных областях, где необходимо скомпенсировать или уравнять воздействие внешних сил для достижения определенных целей. Вот некоторые примеры применения компенсации сил:
— В инженерии и строительстве принцип компенсации сил используется при проектировании мостов, зданий и других конструкций. С помощью специальных устройств и механизмов компенсируются давление, вес и другие воздействующие силы, чтобы обеспечить стабильность и надежность конструкций.

— В автомобильной промышленности компенсация сил применяется в системах подвески и амортизации. Силы, возникающие при движении автомобиля по неровной дороге, компенсируются с помощью специальных пружин, амортизаторов и других устройств, чтобы обеспечить комфортную поездку и защитить автомобиль от повреждений.
— В механических системах компенсация сил применяется для балансирования вращающихся частей. Например, в двигателях, компенсационные веса устанавливаются на валу, чтобы уравновесить вращение и снизить вибрацию.
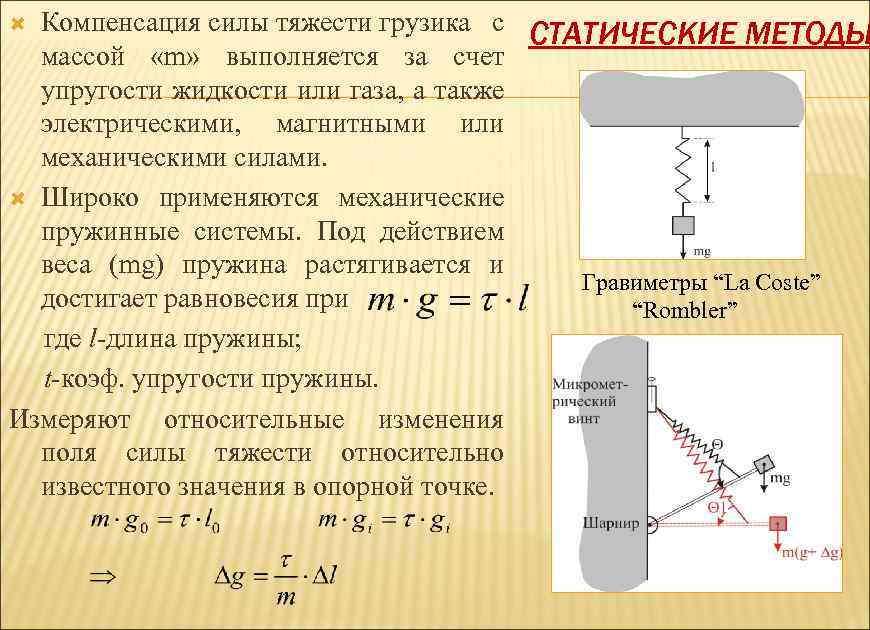
— В физике компенсация сил используется для измерения силы тяжести. Например, при использовании весов с компенсацией сил, можно точно определить массу предмета, уравновешивая его с помощью грузиков.
— В робототехнике компенсация сил применяется для обеспечения точности и стабильности движения роботов. Силы, возникающие при соприкосновении робота с окружающими объектами, компенсируются с помощью датчиков и алгоритмов управления, чтобы предотвратить повреждения и обеспечить плавность работы.
Принцип действия сил скомпенсировано является основой многих физических явлений, таких как равновесие тела и устойчивость конструкций.
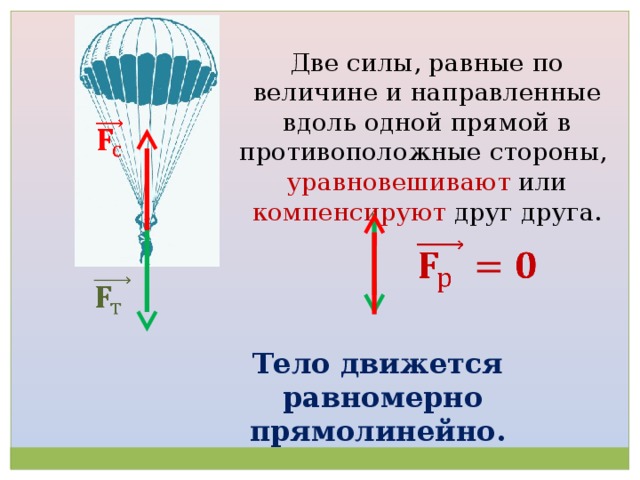
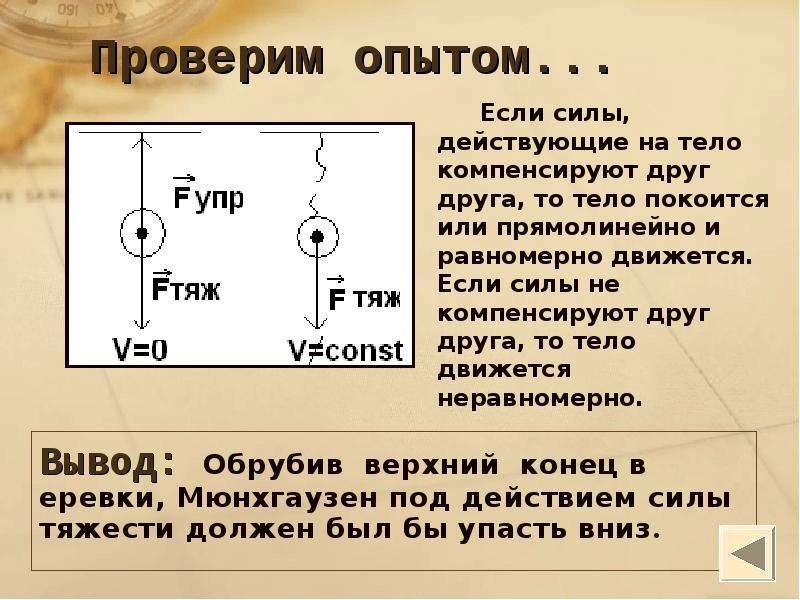
Выражение действия сил скомпенсировано, или силы, действующие в противоположных направлениях и равные по модулю, но противоположные по направлению, взаимно уравновешивают друг друга.
Значение выражение действия сил скомпенсировано важно вследствие того, что позволяет определить равновесие или дисбаланс сил в системе.
Понимание принципа действия сил скомпенсировано необходимо для создания и анализа устойчивых конструкций и механизмов.
Принцип действия сил скомпенсировано также важен для понимания взаимодействия сил в природе и между объектами.
В целом, принцип действия сил скомпенсировано является фундаментальным понятием в физике и инженерии, позволяющим анализировать и понимать равновесие сил и устойчивость систем. Это понимание имеет широкое применение в различных областях науки и техники.
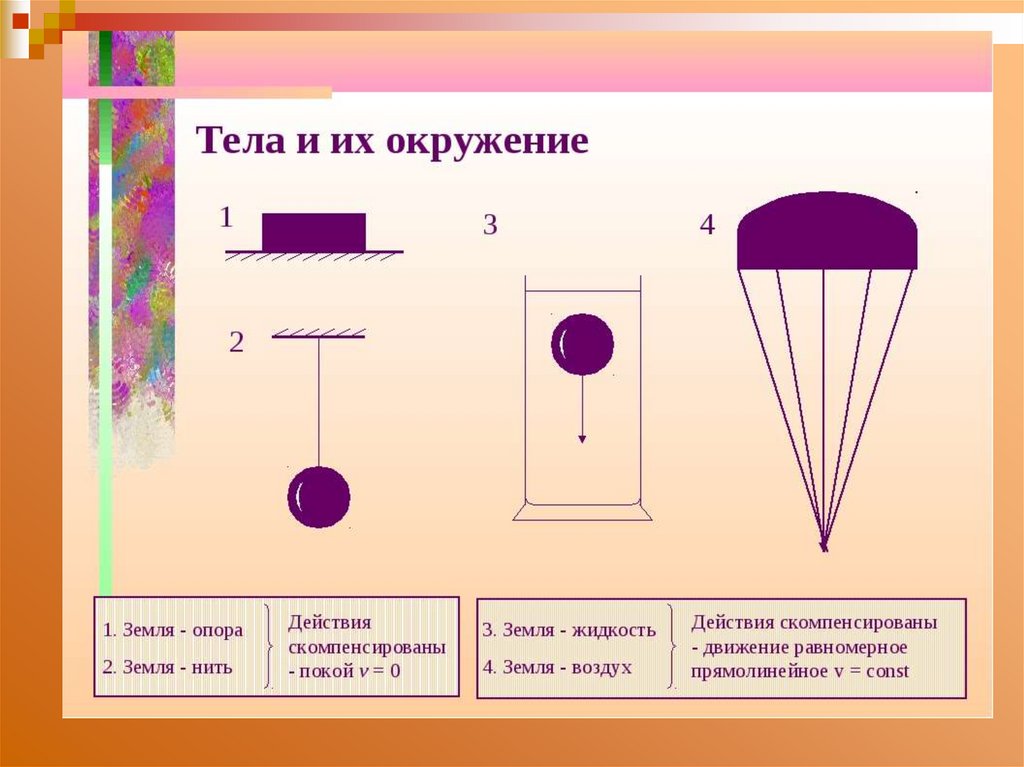
Первый закон Ньютона
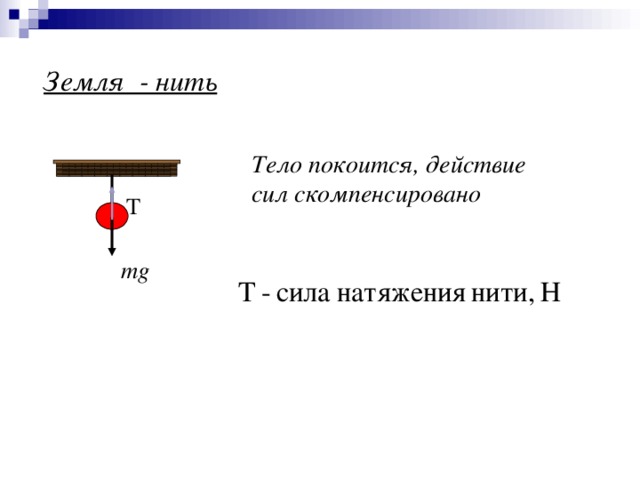
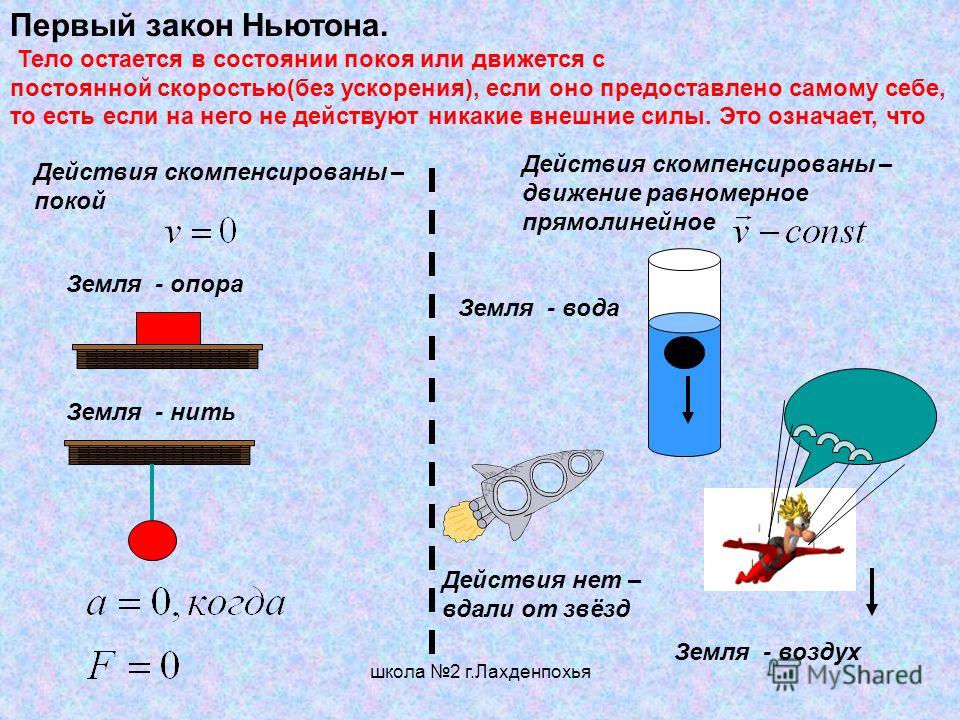
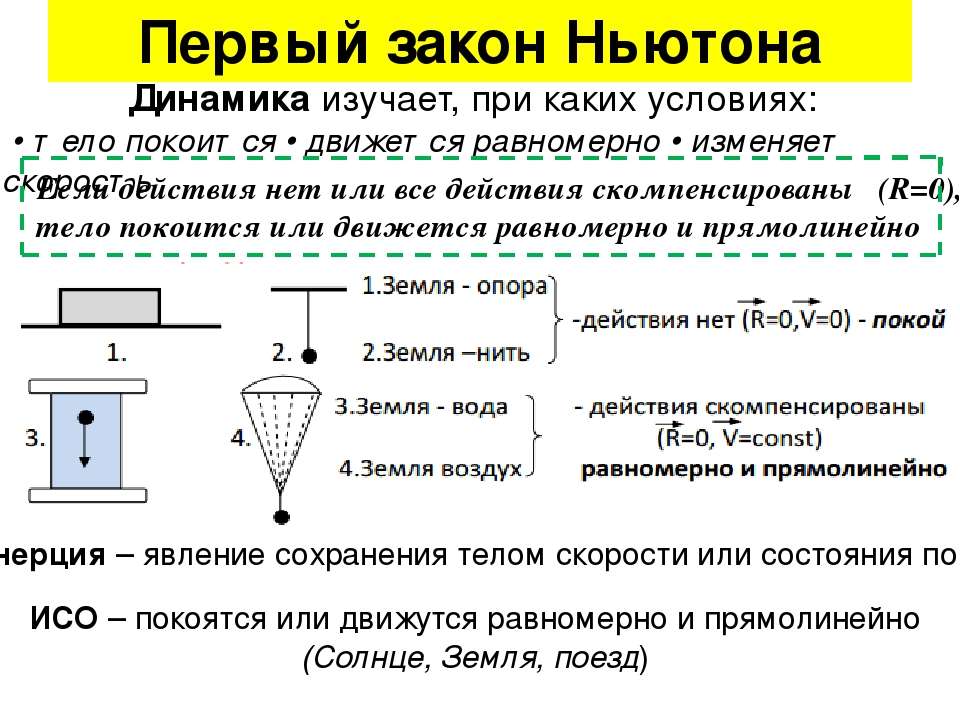
Если на тело не действуют силы, то механическое состояние тела не изменяется: тело не движется (не изменяются координаты тела, тело находится в состоянии покоя) или движется с постоянной скоростью (не изменяется скорость, тело движется без ускорения).
Свободной материальной точкой называют материальную точку, которая не взаимодействует с другими телами. Если действие сил скомпенсировано, то точка – квазисвободная.
Движение свободной или квазисвободной частицы называется движением по инерции.
Закон инерции: всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит её изменить это состояние.
Характер движения зависит от выбора системы отсчета. Одно и то же движение в разных системах отсчета выглядит по-разному.
Существуют такие системы отсчета, в которых свободная материальная точка движется равномерно и прямолинейно из любого начального положения в любом направлении.
Такие системы отсчета называются инерциальными системами отсчета (ИСО). Системы отсчета, в которых нарушается закон инерции, называются неинерциальными.
Если частица свободная, то она движется с постоянной скоростью или покоится относительно инерциальной системы отсчета. Кинематическое уравнение движения для свободной материальной точки можно записать как \(\vec r(t) = + \vec vt\) ; \(\vec r(t)\) – радиус-вектор материальной точки.
Способность тел сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Мерой инертности тела является физическая величина, называемая массой тела.
Масса (тела) – физическая величина, являющаяся одной из характеристик материи, определяющая её инерциальные (инертная масса) свойства:
1. Величина инертной массы не зависит от величины и направления действия сил.
2. Масса аддитивна – масса системы тел равна сумме масс тел, входящих в систему.
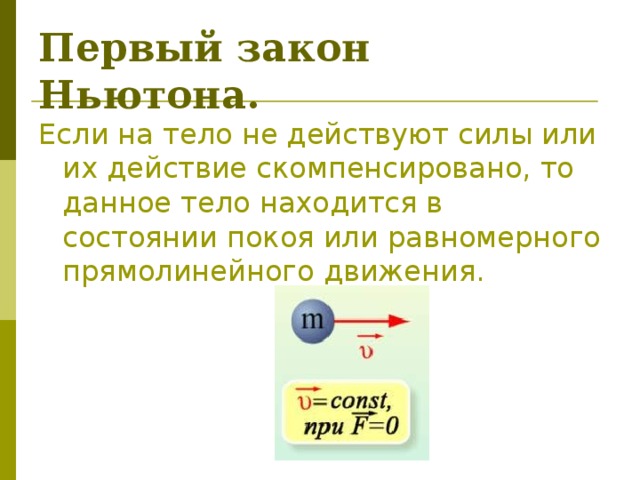
Первый закон Ньютона – это закон инерции. Инерция – стремление тела сохранить состояние покоя или равномерного (прямолинейного) движения.
Первый закон Ньютона формулируется следующим образом: всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока воздействие со стороны других тел не заставит его изменить это состояние.
Характер движения зависит от выбора системы отсчета. Одно и то же движение в разных системах отсчета выглядит по-разному.
Рассмотрим пример. Пусть системой отсчета является прямолинейно и равномерно движущийся вагон. Покоящееся относительно вагона тело – это квазисвободное тело, оно сохраняет это состояние до тех пор, пока скорость вагона постоянна. Относительно Земли это тело движется с постоянной скоростью. Можно сказать, что Земля и движущийся с постоянной скоростью относительно Земли вагон – это две инерциальные системы отсчета. Движение тела относительно этих систем отсчета подчиняется первому закону Ньютона. Но если вагон начнет заворачивать, тормозить или ускорять ход, то появятся явные нарушения закона Ньютона: покоящееся до того тело придет в движение без явного воздействия на него со стороны других тел. Система отсчета, в которой выполняется первый закон Ньютона, называется инерциальной системой отсчета. Первый закон Ньютона утверждает существование инерциальных систем отсчета.
Инерциальных систем существует бесконечное множество. Любая система отсчета, движущаяся относительно некоторой инерциальной системы прямолинейно и равномерно, будет также инерциальной.
Опытным путем установлено, что за инерциальную систему отсчета с большой точностью можно принять систему отсчета, центр которой совмещён с Солнцем, а оси направлены на определённые звёзды. Эта система называется гелиоцентрической системой отсчёта.
Земля, строго говоря, не является инерциальной системой отсчёта (Земля вращается вокруг своей оси и вокруг Солнца). Однако в большинстве практических случаев заметить эту неинерциальность трудно. Поэтому систему отсчёта, связанную с Землёй, можно считать инерциальной.
Первый закон Ньютона отражает то, что в инерциальных системах отсчета:
пространство однородно и изотропно;
Однородность пространства означает, что все точки пространства эквивалентны.
Изотропностьпространства означает, что все направления эквивалентны (равноправны).
Однородность времени означает, что все моменты времени эквивалентны.
Роль действия сил в различных инженерных и технических системах
В инженерии и технических системах действие сил играет ключевую роль в обеспечении равновесия и стабильности. Силы могут быть как внутренними, действующими внутри системы, так и внешними, действующими на систему извне. Действие сил может быть как положительным, направленным на обеспечение требуемого функционирования системы, так и негативным, приводящим к деформации или разрушению.
Одной из основных задач в связи с действием сил в инженерных системах является их компенсация. Действие сил должно быть скомпенсировано внутри системы, чтобы обеспечить ее стабильность и равновесие. Если действие сил не будет скомпенсировано, это может привести к нежелательным последствиям, таким как деформация, смещение или разрушение системы.
Для компенсации действия сил в инженерных и технических системах применяют различные методы и технологии. Например, при проектировании зданий и сооружений необходимо учитывать действие сил гравитации, ветра, сейсмических воздействий и других внешних факторов. Проектировщики и строители применяют специальные структурные элементы, такие как фундаменты, стены, балки и колонны, для компенсации этих сил и обеспечения прочности и устойчивости зданий.
В технике также применяются методы компенсации действия сил. Например, в автомобилях и самолетах используются системы подвески и амортизации для компенсации действия сил при движении по неровной поверхности или при турбулентности. Эти системы позволяют создать комфортные условия для пассажиров и обеспечить безопасность при эксплуатации.
Необходимость компенсации действия сил возникает также в электротехнике и электронике. Например, в электрических машинах и устройствах используются различные системы охлаждения для компенсации действия сил, возникающих при работе. Это позволяет предотвратить перегрев и повреждение устройств.
Таким образом, действие сил играет важную роль в различных инженерных и технических системах. Компенсация действия сил является неотъемлемой частью проектирования и разработки этих систем, позволяя обеспечить их стабильность, функциональность и безопасность.


Цель и смысл компенсации действия сил
Когда решаем задачу, связанную с действием сил, особенно при анализе механических и электрических систем, часто возникают ситуации, когда необходимо компенсировать или уравновесить действие сил для достижения желаемого результата. Целью компенсации действия сил является достижение равновесия или баланса сил, что позволяет решить проблемы и добиться определенных целей.
Одной из основных причин, по которой возникает необходимость в компенсации действия сил, является отрицательное влияние неконтролируемых или нежелательных сил на систему. Это может быть любая сила, которая мешает достичь желаемого состояния или создает неблагоприятные условия для функционирования системы.
Компенсация действия сил позволяет преодолеть препятствия, снизить негативное воздействие внешних сил и обеспечить оптимальные условия работы системы. Зачастую такая компенсация может включать в себя применение противоположных сил, применение силы равной по величине, но противоположно направленной, или использование механизмов и устройств, которые контролируют и минимизируют воздействие нежелательных сил.
Важным аспектом компенсации действия сил является балансировка сил для обеспечения стабильности и равновесия системы
Это особенно важно в механических системах, где правильное распределение сил позволяет предотвратить преждевременный износ или поломку компонентов, а также обеспечивает безопасное и эффективное функционирование системы
Примеры сил, требующих компенсации:
Тип силы
Смысл компенсации
Примеры
Тяжеловесная сила
Поддержание равновесия
Использование противовесов или устойчивых оснований
Магнитная сила
Отталкивание или притяжение
Использование магнитов с противоположной полярностью для сбалансированной силы
Электрическая сила
Уравновешивание потенциалов
Использование резисторов или конденсаторов для компенсации разности потенциалов
В заключение, компенсация действия сил играет важную роль в решении проблем, связанных с действием сил на системы. Она позволяет достичь равновесия и баланса, устранить нежелательные воздействия и обеспечить стабильное и эффективное функционирование системы. Компенсация действия сил требует правильного анализа и подбора силы или устройства для достижения желаемого результата.
Вопрос-ответ:
Что такое принцип суперпозиции сил и зачем он нужен?
Принцип суперпозиции сил позволяет определить перемещение материальной точки под действием нескольких сил, действующих на нее одновременно
Это важно, если нужно измерить силу, которая действует на объект в сложной системе сил, каждая из которых может быть искажена другими. Без применения этого принципа сложно записать и учесть влияние всех сил на движение объекта
Как записать математическую формулу принципа суперпозиции сил?
Принцип суперпозиции сил можно записать математически следующим образом: F = F1 + F2 + F3 + … + Fn, где F — сила, действующая на объект, а F1, F2, F3 и Fn — силы, действующие на объект по отдельности
Важно помнить, что все силы имеют векторную природу и могут быть представлены в виде векторов
Как найти результат суперпозиции сил на практике?
Для нахождения результата суперпозиции сил нужно сложить все силы, действующие на объект векторным способом. Для этого нужно определить направление каждой силы и применить закон параллелограмма для получения суммы всех сил. Полученный результат будет являться силой, действующей на объект, так как принцип суперпозиции сил гласит, что совокупное действие всех сил равно действию единственной силы.
Какие примеры применения принципа суперпозиции сил существуют в жизни?
Примеры применения принципа суперпозиции сил можно найти в различных областях. Например, в инженерии и строительстве принцип суперпозиции сил используется для расчета прочности материалов и конструкций. В физике принцип суперпозиции сил используется для расчета движения тел под действием нескольких сил. В медицине принцип суперпозиции сил применяется при разработке протезов и ортопедических конструкций.
Можно ли применять принцип суперпозиции сил к системе тел?
Да, принцип суперпозиции сил можно применять как к отдельному телу, так и к системе тел. В случае со системой тел нужно сложить все силы, действующие на каждое тело, а затем сложить полученные силы и найти суммарную силу, действующую на систему.
Как изменится принцип суперпозиции сил при взаимодействии нескольких объектов между собой?
При взаимодействии нескольких объектов между собой принцип суперпозиции сил будет состоять в расчете сил, действующих на каждый объект. В этом случае нужно сложить все силы, действующие на каждый объект по отдельности, затем найти общую силу, действующую между объектами, и добавить ее к суммарной силе, действующей на каждый объект. В итоге получится силовая система, которая позволит определить перемещение каждого объекта в системе в зависимости от взаимодействия со всеми остальными объектами.